【ASSIA 7】明日预告:智能自动化学科前沿讲习班——“智能、控制与数学”


智能自动化学科前沿讲习班是由中国自动化学会主办的高端学术交流活动,旨在促进自动化领域的科研人员在短时间内快速了解学科前沿和最新研究,并为专家学者提供探讨热点方向和交流学术进展的平台。每期讲习班围绕一个热点专题,邀请该学科方向从事前沿工作的专家学者作学术报告,并与参会者交流讨论。
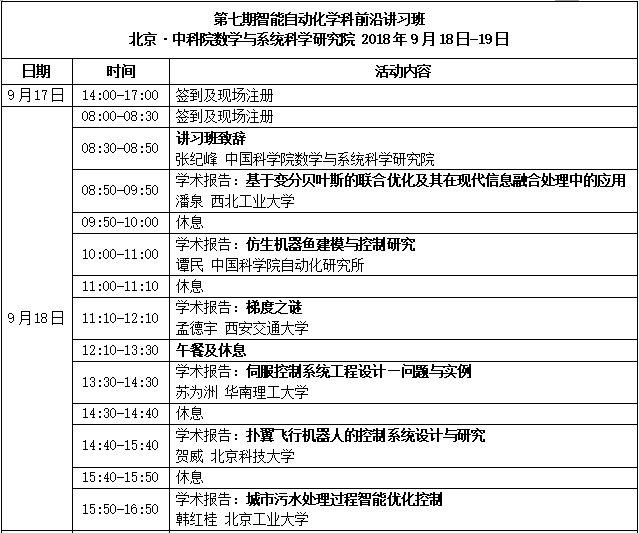
中国自动化学会将于2018年9月18日-9月19日(明后两日)在北京•中国科学院数学与系统科学院举办第7期智能自动化学科前沿讲习班,主题为“智能、控制与数学”,此次讲习班由中科院数学与系统科学研究院张纪峰研究员和西北工业大学潘泉教授共同担任学术主任,邀请业界多位知名专家作主题报告,分享交流智能控制的学术前沿、产业发展及应用实现。

张纪峰 研究员
中国科学院数学与系统科学研究院
讲习班致辞
简介:张纪峰,中国科学院数学与系统科学研究院系统所所长。研究方向为随机系统、有限信息系统、多自主体系统的分析与控制等。1997年获国家杰出青年基金资助,2009年获全国优秀博士学位论文指导教师荣誉证书, 2010年和2015年先后两次获国家自然科学二等奖,2014年当选为美国电气与电子工程师协会会士(IEEE Fellow),2016年当选为国际自动控制联合会会士(IFAC Fellow)和国际系统与控制科学院院士,2018年当选为欧洲科学与艺术院院士。 现为国务院学位委员会系统科学评议组召集人、国际自动控制联合会技术局副主席、中国自动化学会副理事长、中国系统工程学会副理事长、中国工业与应用数学会常务理事,先后担任《系统科学与数学》、《中国科学: 信息科学》、《系统工程理论与实践》、《IEEE Trans. on Automatic Control》、《SIAM Journal on Control and Optimization》等多个期刊的主编、副主编、编委等;以及包括多届中国控制会议、中国系统科学大会、2012 IEEE Conference on Control Applications, the 9th World Congress on Intelligent Control and Automation, the 17th IFAC Symposium on System Identification, the 20th World Congress of the International Federation of Automatic Control (IFAC)等在内的多个系统控制大会的副主席、程序委员会主席、副主席等。

潘泉 教授
西北工业大学
题目:基于变分贝叶斯的联合优化及其在现代信息融合处理中的应用
简介:潘泉,西北工业大学教授、自动化学院院长,国家保密学院常务副院长,信息融合技术教育部重点实验室主任。主要研究方向:信息融合、目标跟踪与识别、空天平台感知与控制、多光谱偏振图像处理等。获国家科技进步一、三等奖各1项,省部级科技进步奖10项,国家教学成果二等奖1项、省教学成果特等奖1项。出版专著10部、国家级规划教材1部,发表论文400余篇,SCI收录100余篇次。获全国优秀科技工作者、中国青年科技奖、陕西省有突出贡献专家、陕西省优秀教师等称号。任国务院控制科学与工程学科评议组委员、中国航空学会信息融合专委会、机载武器试验与鉴定专委会等副主任。
摘要:梳理了近年来信息融合理论的发展,分析了信息融合处理系统中存在的非线性、多模式、深耦合、网络化、高维数和未知扰动输入等问题,讨论了现代信息融合处理系统中联合优化的必要性。系统介绍了解决联合优化问题的主要方法,包括联合检测与估计、联合聚类与估计、联合关联与估计及联合决策与估计等,着重阐述了变分贝叶斯辨识、估计与优化的统一框架,以及融合处理一体优化方法。通过天波超视距雷达等应用案例,给出了多模式多传感器多目标场景下变分贝叶斯跟踪问题求解的一般性描述。最后,讨论了变分贝叶斯理论在信息融合领域的开放问题和未来研究方向。

陈鑫 教授
中国地质大学(武汉)
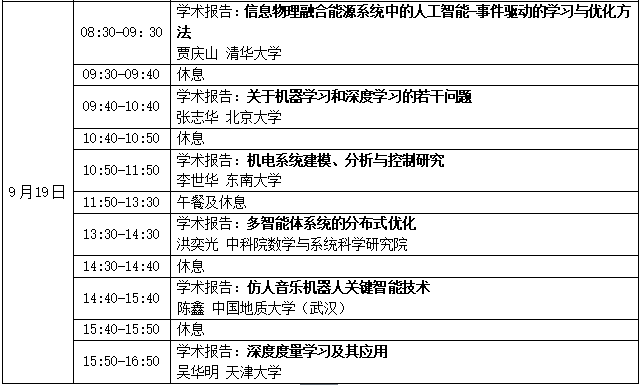
题目:仿人音乐机器人关键智能技术
简介:陈鑫,2007年博士毕业于澳门大学,获机电工程学博士学位。2007年9月进入中南大学信息科学与工程学院任职,2013年评为博士生导师。2014年调入中国地质大学(武汉)自动化学院担任教授,博士生导师。2017年获得湖北省“楚天学者”计划特聘教授资助。现为中国自动化学会控制理论专业委员会委员,中国人工智能学会空天系统专业委员会委员,中国自动化学会青年工作者委员会常务委员,中国自动化学会教育工作委员会委员。 主要从事智能控制、机器人和过程控制的研究。主持包括国家“863”计划任务课题、国家自然科学基金面上项目、湖北省杰出青年科学基金项目在内的国家级、省部级等科研项目12项。以第一作者/通讯作者发表学术论文45篇,其中SCI/EI检索34篇。研究成果授权国家发明专利9项,出版专著1部。
摘要:音乐机器人是机器视觉、智能学习与决策、机械臂设计与控制等多个人工智能技术交叉融合的典型代表。其研究不仅在音乐领域为突破人类演奏或作曲的专业极限,丰富音乐的表现形式提供新的途径,更是探索人类情感建模,类人行为决策与控制,高速手眼协调控制等智能系统关键技术的重要平台。 本次报告以扬琴演奏机器人的智能化关键技术为主要内容。介绍基于机器视觉的智能识谱技术,包括五线谱谱线校正与分离、多层次音符识别技术,实现对纸质乐谱实时辨识与编码;介绍基于类人经验学习的演奏技法在线决策技术,在乐理分析基础上,通过机器学习方法获得类人演奏技法,实现演奏的高实时性决策;采用拟人相似度优化方法,建立具有似人特性的机械臂运动轨迹规划与运动控制技术;介绍面向中国民族音乐的多元音乐属性识别和作曲系统,实现基于人机交互的智能在线作曲。最后介绍基于ROS系统的音乐机器人高实时性决策与控制系统实现。通过音乐智能机器人技术的介绍,提出在音乐机器人高实时性应用环境下,机器视觉、情感计算、机器人学习等技术中存在的问题和未来研究方向。

韩红桂 教授
北京工业大学
题目:城市污水处理过程智能优化控制
简介:韩红桂,北京工业大学教授,博士生导师。主要研究方向为城市污水处理过程智能优化控制,先后入选国家自然科学基金优秀青年科学基金、中国科协青年人才托举工程、北京市科技新星计划等;研究成果共发表学术论文40余篇,被他人引用600余次;撰写专著1部;获得授权美国/中国发明专利30余项、软件著作权30余项;获教育部科技进步一等奖、吴文俊人工智能科学技术进步奖一等奖、中国产学研合作创新成果科技进步一等奖等。
摘要:城市污水处理是保护环境、实现水资源循环利用的有效途径,污水处理优化运行控制技术是保证其排放达标、降低能耗的核心技术。然而,由于城市污水处理过程具有大规模、多流程、非平稳、强耦合、非线性等特点,目前城市污水处理厂运行状况不容乐观,自动化、智能化已成为污水处理行业未来发展的方向。智能优化控制以攻克城市污水处理过程运行工况不稳定、出水水质超标、处理成本过高的共性难题为目标,研究关键水质参数在线检测、操作变量自组织控制、异常工况自愈控制和全流程协同优化等理论与关键技术,推动智能控制理论发展,引领污水处理行业技术进步。

贺威 教授
北京科技大学
题目:扑翼飞行机器人的控制系统设计与研究
简介:贺威,北京科技大学自动化学院教授、博导、副院长。2006年和2008年在华南理工大学自动化学院分别获得学士和硕士学位,2011年在新加坡国立大学获得博士学位。发表SCI期刊论文80余篇,申请或授权国家发明专利20余项。目前担任IEEE TCST、IEEE TNNLS、IEEE TSMCA、IEEE/CAA JAS、《自动化学报》等杂志编委。获2015年国家优秀青年科学基金、2016年WCICA“谈自忠最佳理论论文奖”、2017年英国皇家学会“牛顿高级学者基金”、2017年IEEE SMC学会Andrew P. Sage最佳汇刊论文奖、2017年中国自动化学会自然科学一等奖,入选2017年教育部青年长江学者。主要研究方向为:扑翼飞行机器人控制、柔性机器人系统建模与控制、分布参数系统控制。
摘要:扑翼飞行机器人是受昆虫和鸟类飞行方式启发的一类飞行机器人,与常见的固定翼和旋翼飞行器相比,扑翼飞行机器人具有质量轻、效率高、机动性强、能耗低等优点,是飞行机器人发展的重要方向。仿生扑翼飞行机器人的动力学特性较为复杂,在控制系统设计和实现方面具有一定的难度。扑翼飞行机器人在飞行中受到气流作用会产生预期之外的振动和形变,从而影响飞行性能,甚至缩短使用寿命。本报告将研究扑翼机器人的自主控制和振动控制问题,分析扑翼飞行机器人的动力学模型,针对自主控制问题我们提出神经网络控制,针对振动问题我们提出自适应边界控制策略,建立了一套有效的控制系统设计和稳定性分析方法。我们搭建了几款仿生扑翼飞行机器人和柔性翼振动控制平台,并将所提出的智能控制方法应用到这些扑翼飞行机器人平台上。

洪奕光 研究员
中科院数学与系统科学研究院
题目:多智能体系统的分布式优化
简介:洪奕光在北京大学力学系获得学士和硕士学位,在中科院系统科学所获得博士学位。随后在中科院系统科学所工作,并到香港理工大学做博士后。还在2000-2003年在美国杜克大学工作访问。现在是中科院数学与系统科学研究院研究员,中科院系统控制重点实验室主任,中科院国家数学与交叉科学中心信息交叉部主任。还是IEEE Fellow和中国人工智能学会会士。担任自动化学会控制理论专委会主任、 中国系统工程学会副秘书长、数学学会常务理事,IEEE控制系统学会(Control Systems Society)执委(board of governor)。现任Control Theory and Technology主编,曾任《自动化学报》副主编。还(曾)是国际知名期刊IEEE Transactions Automatic Control、IEEE Control Systems Magazine、IEEE Transactions Control of Network Systems、Nonlinear Analysis:Hybrid Systems以及其他SCI期刊Kybernetika、Asian Journal of Control 和Journal of Systems Science and Complexity 编委(Associate Editor)。 多年来从事非线性控制、多智能体控制、分布式优化和博弈、社会网络、软件可靠性、机器人等方面的研究。 曾经获得中国控制会议‘关肇直’最佳论文奖(1997)、国际自动控制联合会(IFAC)世界大会的青年作者奖(1999)、 美国国家研究委员会(NRC)联合研究奖励基金(2000)、中科院青年科学家奖(2001)、国家杰出青年基金(2004)、中国青年科技奖(2006)、中科院杰出青年(2007)、国家自然科学二等奖(2008)等。
摘要:当今的热门方向包括机器学习和群体智能都离不开优化算法的分析和设计,在本报告中我们将从凸优化说起并将原来的集中式算法推广到分布式,其中包括带有各种约束(局部,耦合等)的优化算法的设计和收敛性分析等。这与群体智能的算法设计有着密切的关系,相关的研究也为分布式机器学习打下了基础。

贾庆山 副教授
清华大学
题目:信息物理融合能源系统中的人工智能-事件驱动的学习与优化方法
简介:贾庆山分别于2002、2006年毕业于清华大学自动化系获得工学学士、博士学位。留校任教,2010年升副教授。2015年任长聘副教授。分别于2006、2010、2013年任哈佛大学、香港科技大学和麻省理工学院访问学者。现任IEEE Transactions on Automatic Control副编辑,曾任IEEE Transactions on Automation Science and Engineering、Discrete Event Dynamic Systems – Theory and Applications副编辑。主要学术方向为网络化信息物理融合能源系统的优化理论与方法,特别在序优化及事件驱动优化方法的应用与发展方面做出了贡献。发表二十余篇IEEE汇刊论文。先后获得国家自然科学二等奖(2009年、第四完成人)、国家自然科学基金优秀青年基金(2012年)、教育部自然科学二等奖(2013年、第二完成人)、中国自动化学会自然科学一等奖(2015年、第七完成人)、IEEE国际自动化科学与工程年会最佳论文奖(2015年)、英国运筹学协会Tocher奖(国际期刊Journal of Simulation 2015年-2016年最佳论文奖)。 担任IEEE Internet of Things Activity Board委员(2016至今)、IEEE控制系统协会Board of Governors委员(2017)、IEEE控制系统协会离散事件系统专业委员会主席 (2012-2015)、IEEE控制系统协会北京分会主席(2012至今)、IEEE机器人与自动化协会智能建筑专业委员会副主席(2012至今)、IFAC智慧城市控制专业委员会主席(2015至今)。担任中国自动化学会第十一届控制理论专业委员会委员兼副秘书长(2018-2022),中国自动化学会第一届工业控制系统信息安全专业委员会委员(2016-2020)。
摘要:在以城市能源互联网、智能建筑等为代表的信息物理融合能源系统中,信息流、能源流深度融合。这为实现多种能源综合互补、供需匹配,提高系统的整体能效水平,同时提升用户的舒适体验,均提供了巨大的机遇。但此类系统的综合优化一般涉及在多个时间和空间尺度上的动态过程。比如在城市能源互联网中,在供能一侧,风能与太阳能等新能源的发电量每分钟均可能发生较大幅度的变化,且有逐时、逐日等不同时间尺度的发电预测模型,有单台设备、风电场等不同时间尺度的发电预测模型。在用能一侧,电动汽车的出行需求也有较大的不确定性,有逐时、逐日等不同时间尺度的预测模型,有停车场、城区、城市等不同空间尺度的预测模型。如何综合利用这多个尺度的模型,实现系统整体性能的优化,具有重要的实际意义,也有巨大的科学挑战。本报告简单介绍人工智能在本领域的巨大应用前景,并着重汇报事件驱动的学习与优化方法近期的研究成果,以及应用在多尺度信息物理融合能源系统综合优化中的研究进展。

李世华 教授
东南大学
题目:机电系统建模、分析与控制研究
简介:李世华,东南大学二级教授,自动化学院副院长,江苏省自动化学会秘书长,IEEE工业电子系统协会运动控制技术委员会委员、电机技术委员会委员。从事机电系统的非线性控制理论及应用方面的研究工作,包括非光滑控制理论,干扰观测控制理论及其在运动控制、交流伺服、汽车电子、电力电子系统应用等。负责完成科研项目三十多项,其中主持国家自然科学基金3项、973子课题1项、省部级基金8项、企业委托等其它项目20余项,与企业合作完成国家十二五863重大项目1项。致力于走控制理论与应用结合之路,研究成果已经为企业产生了显著的经济效益。出版英文专著1部、中文专著1部,发表论文200多篇,其中SCI论文100余篇。获得教育部自然科学奖二等奖1次(排名第1)、江苏省科学技术进步二等奖1次(排名第2)。入选江苏省杰出青年基金计划和教育部新世纪优秀人才计划。入选2017年科睿唯安全球高被引科学家榜单,连续三年入选Elsevier中国高被引学者。
摘要:机电系统存在各类非线性环节:摩擦、间隙迟滞、饱和等,参数不确定、摄动以及外部干扰无处不在,这些因素极大地影响了机电系统闭环性能。与高增益以及PID等控制等方法相比,基于时域频域先进建模、分析与干扰估计前馈补偿的复合控制方法给出了另外一种不同的解决途径,它可以很好地提升闭环系统的精度和抗干扰性能。本次报告将讨论如何从时域/频域建模、干扰建模和前馈、先进复合控制角度提高闭环系统的抗干扰性能和精度,分析了传统PID控制算法的理论局限性,给出了这方面的一些最新理论研究进展和成果;结合运动控制、电力电子系统、过程控制、飞控系统等不同应用特点,探讨了几种不同的应用设计案例,展示了实验验证结果。

孟德宇 教授
西安交通大学
题目:梯度之谜
简介:孟德宇,西安交通大学教授,博导。任西安交大大数据算法与分析技术国家工程实验室机器学习教研室负责人。共接收/发表论文80余篇,其中包括IEEE汇刊论文24篇,CCF A类会议论文32篇。目前主要聚焦于自步学习、误差建模、张量稀疏性等机器学习与计算机视觉领域的基础研究问题。
摘要:机器学习的传统方法强调具有问题理解与理论基础的模型构建与算法设计,而现代机器学习更强调依赖于数据数量与质量的深度学习策略。两类方法从机理上通常认为存在显著的差异。本次报告将从梯度角度探讨两类方法论对于学习问题认识的本质一致性,并基于该理解尝试引导出一类新型的半监督/无监督深度学习方法,及其在图像去雨及低质量 CT 图像增强方面的应用。

苏为洲 教授
华南理工大学
题目:伺服控制系统工程设计—问题与实例
简介:苏为洲分别于1983、1986年在东南大学自动控制系获得学士和硕士学位,1996年于新加坡南洋理工大学获得电机工程硕士学位,2000年获澳大利亚纽卡斯大学电机工程博士学位。1986-1994年任教于东南大学自动控制系,2000-2004年在纽卡斯大学、香港科技大学等校任博士后研究员。2004年起任教于华南理工大学,现任华南理工大学自动化学院教授、博士生导师。苏为洲教授的研究领域包括:基于网络的控制和信号处理、随机线性系统的镇定与最优控制、鲁棒与最优控制、反馈系统性能极限分析、伺服系统的建模与最优控制等。
摘要:伺服控制系统是装备制造,国防,移动通讯,深空探测等领域中的基础性单元,其中的控制算法设计是一项瓶颈性技术。我们将结合印刷设备、移动天线中的伺服控制系统,探讨伺服控制系统的建模、分析与设计问题。在建模方面,我们将着重讨论系统模型特别是系统不确定性在频域中的描述与验证;然后,我们将以伯德积分为工具讨论系统设计目标的选取等问题;最后,我们讨论伺服系统的H2-Hinf双目标最优设计问题和相应的设计方法。

谭民 研究员
中国科学院自动化所
题目:仿生机器鱼建模与控制研究
简介:谭民, 中国科学院自动化所,研究员、博士生导师。国家杰出青年基金获得者,国家基金委创新研究群体负责人,国务院学位委员会第七届学科评议组成员,新世纪百千万人才工程国家级人选,中国科学院“百人计划”入选者,曾担任国家“十五-863”计划机器人技术主题专家组成员,担任国家“十一五-863”计划先进制造领域专家组成员。 近年来在先进机器人控制、仿生机器人、多机器人协调与控制等方面开展研究与开发工作,负责和参加国家重点研发计划项目、863项目、973项目、自然科学基金项目等 20余项。发表SCI收录论文 100 余篇,授权的国家发明专利40余项。担任多个学术期刊的编委,担任多个学会的理事和专业委员会的委员。
摘要:本报告重点介绍仿生机器鱼高效、高机动运动控制, 建立机器鱼运动的鱼体波模型, 提出高机动运动控制方法, 通过开展鱼类的仿生运动研究,促进仿生机器鱼控制理论和方法的发展,对于高效率、高机动性、高度环境适应性的新型水下运载系统、作业系统的开发研制与应用具有重要的意义。

吴华明 博士
天津大学
题目:深度度量学习及其应用
简介:吴华明,博士(获德国柏林自由大学最高荣誉),天津大学应用数学中心讲师,主要从事移动计算与机器学习方面的研究。担任Wireless Communications & Mobile Computing专刊特邀主编。IEEE/ACM TON, IEEE TII, TNNLS, TIP, TCOM, TWC, TSC, TCC等国际权威期刊的审稿人,ICPE, QEST, EPEW, VALUETOOLS, CVC, FICC, IntelliSys等国际会议主席或程序委员会委员。在IEEE Trans. Mobile Comput.(CCF A), IEEE Trans. Cloud Comput. (IF:7.928) 等期刊上发表多篇论文。
摘要:机器学习的关键是特征学习,获得好的特征是识别成功的关键。传统方法往往依赖手动构建距离函数,人工选取特征费时费力、需要启发式专业知识,且对数据的改变不鲁棒。度量学习可作为手动选取特征的理想替代,根据不同的任务来自主学习出相应的距离度量函数。本次报告将从度量角度出发,探讨距离度量学习或深度度量学习背后的数学原理,介绍如何针对样本之间的异构性、类别的差异性来构造不同的损失函数,实现刻画不同样本之间的相关、比较关系。将重点介绍几种目前流行的深度度量函数及其在人脸识别、物体识别、姿态估计和信息检索等领域的应用。

张志华 教授
北京大学
题目:关于机器学习和深度学习的若干问题
简介:张志华,北京大学数学科学学院统计学长聘教授,北京大学大数据科学研究中心教授。之前曾经先后任教于上海交通大学和浙江大学计算机系。主要从事于统计机器学习、人工智能和数据科学等领域的研究和教学。是国际机器学习旗舰刊物Journal of Machine Learning Research 的执行编委,并多次受邀担任国际人工智能顶级学术会议的程序委员或高级程序委员。
时间:2018年09月18日-09月19日
地点:中国科学院数学与系统科学研究院南楼N204
如有任何疑问,您可以随时与我们联系。
电话:010-62522472
手机:18811748370
邮箱:caa_assia@163.com

(扫一扫添加工作人员微信)

讲习班更多内容,点击阅读原文
来源:中国自动化学会
往期文章推荐

🔗【ASSIA 7】第七期智能自动化学科前沿讲习班——群贤毕至,共话智能控制学术前沿、产业发展及应用实现!
🔗【通知】2018全国第二十三届 自动化应用技术学术交流会会议通知
🔗【通知】关于举办科普中国•2018互联网科普产品征集活动的通知
🔗【CAC 2018】2018中国自动化大会截稿日期延至9月25日,敬请踊跃投稿!
🔗【大赛报名】菲尼克斯智能技术创新与应用大赛参赛报名进行中,丰厚奖励等你来拿!
🔗【征文】首届ABB杯全国智能技术大赛征文中, 丰厚的奖励等你拿!
🔗【2018国家智能制造论坛】9月25日至26日,中国自动化学会与您相约宁波!
🔗【会员服务】中国自动化学会会员:现可免费申请IEEE Xplore数据库及InnovationQ Plus专利检索分析工具试用!


点击“阅读原文”查看讲习班详细内容



