业界分享:物流场景中的AI和机器人
物流仓储(Logistics)是近年来机器人最热门的新兴应用场景之一。大量机器人相关的研究都以物流中潜在的难点作为研究问题。这可能也是为什么近日香港科技大学邀请了来自蓝胖子机器人的算法工程师Gary Ge,为港科大计算机科学博士生带去了一堂题为 “应用于物流场景的AI机器人解决方案”的讲座。因为干货很多,我们全文转载了这次讲座。

Gary Ge 蓝胖子机器人首席算法工程师
澳大利亚国立大学人工智能博士,澳大利亚国立大学计算机科学学院名誉讲师,澳大利亚国立大学计算机科学学士一等荣誉学位,莫纳什大学信息技术学士。
连续7年担任Angry Birds AI Competition的主要组织者,曾担任IJCAI19、IJCAI18、KR18的PC member, TCIAIG审稿人以及澳大利亚国立大学博士后研究员。有多篇论文在AI顶级会议发表。
主要研究兴趣是机器人技术中的空间表示和推理、物理推理以及任务规划。
以下为Gary讲座实录。
我们现在生活的时代,人工智能已经开始塑造从农业到交通等各行各业未来的发展。
其中物流行业已经成为借力人工智能和机器人技术获得彻底改变的第一批领域之一。
物流中的AI和机器人技术
物流简言之就是在不同地点之间运送物品,这其中会有空间的变化、对物品的操控、资源的约束,以及时间的变化。
这些任务涉及多个经典计算机科学问题,如车辆路线规划、物品装配和包装,资源调度和分配等。
自人工智能出现以来,许多物流领域的问题被作为了人工智能问题来研究,例如决策问题(装箱)、规划问题(装配、路线)以及组合优化问题(任务分配、调度)。
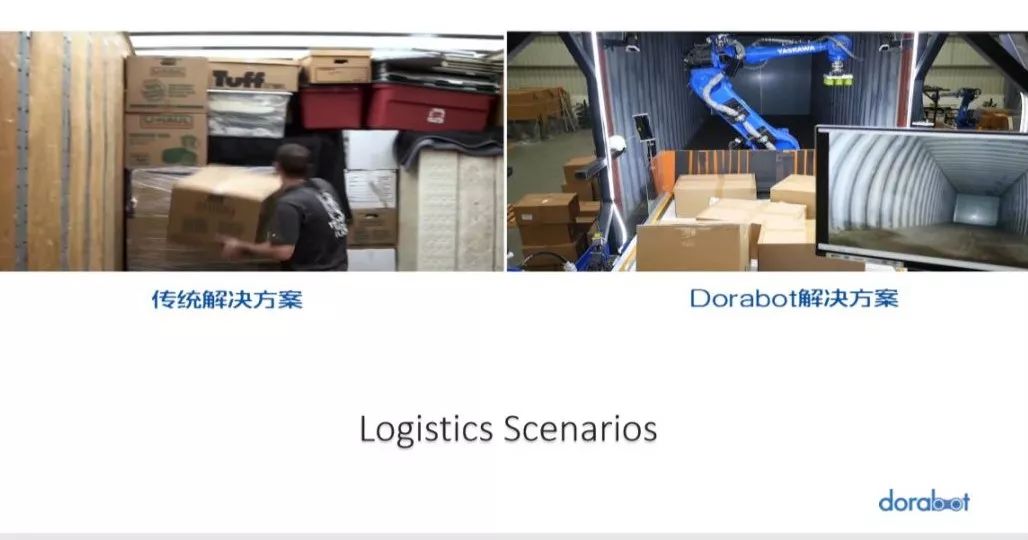
同时,很多实际物流场景,已经部署使用了大量传统机器人,使得一些繁琐、重复和简单的任务实现了自动化。
常见的机器人解决方案在物流场景中的应用是利用AGV解决运输问题,利用机械臂解决物品操控问题。
未来,一个富有前景的人工智能机器人解决方案是建造全自动仓库,在完全没有人为干预的情况下,一批相互协作的机器人自主完成任务。
由此,一个自然要问的问题就是在一个全自动无人仓的搭建过程中,如何设计场地,如何优化一批拥有不同任务的集群机器人的性能,以及如何分配单个机器人的能力和任务。
本质上来讲,这些都可以在人工智能框架中解决。
为什么我们要把这些任务作为一个人工智能问题,而非传统的运筹学,或者机器人问题呢。因为这些任务包含以下特点:
1) 需依靠智能体完成
2) 需运用人类的物理和空间 “推理常识”
3) 需分析优化由多智能体组成的复杂系统
在这些任务中,我们总结出三类问题在此讲中逐一探讨:
1)组合优化问题
2)多机智能体系统
3)场地设计
组合优化问题通俗地讲,即从大量的可能方案中,选择符合一定目标的可行方案。
这个过程,犹如大海捞针。通常一个组合优化问题,往往是NP-hard问题,也就是并不存在一个算法能在多项式时间内找到可行方案。
那么,解决此类问题,我们可以研究问题本身的结构,找出一些能被多项式算法高效解决的子问题,再从这些子问题出发解决。
我们还可以研发近似算法,在较短的时间内找出次优的解决方案。
装箱,是一个在物流过程中常见的问题,也是一个经典的组合优化问题。我们以此为例试做分析。
场景:装箱算法
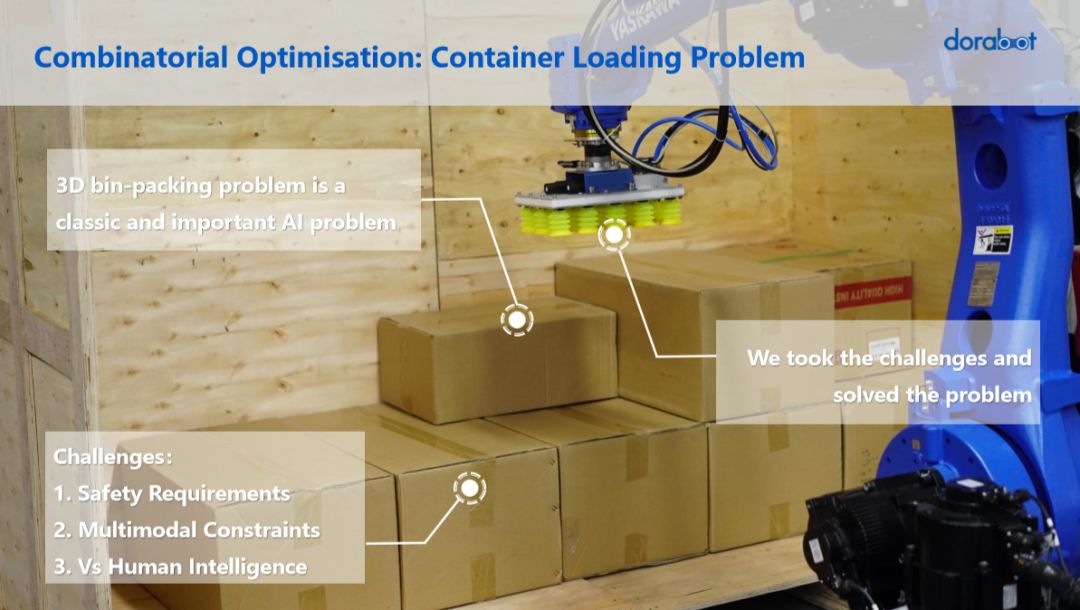
作为一个经典的AI问题,除了其本质计算复杂度,装箱问题因工业界的应用要求会变得更加复杂,具体有以下几个挑战需要解决。
挑战一:保证结构安全性
挑战二:符合多态装箱约束(详见下面三种形态约束)
挑战三:须优于人工方案
在装箱场景中,优化目标是简单明确的,即装得越满越好。然而,问题的约束却是复杂且多态的。
我们需要考虑以下三种不同形态的约束。
一.空间约束
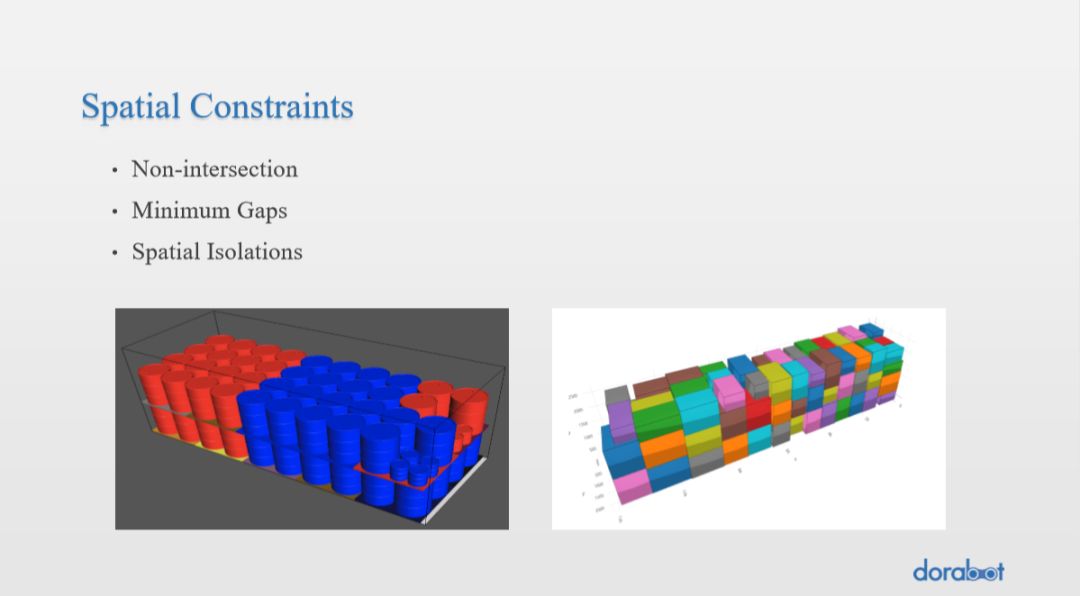
这类约束包括两个货物间无交叠、货物间的间距控制、空间内部存在的障碍物,以及不同类型货物的空间隔离(常见于化学品运输)。
二 .物理约束
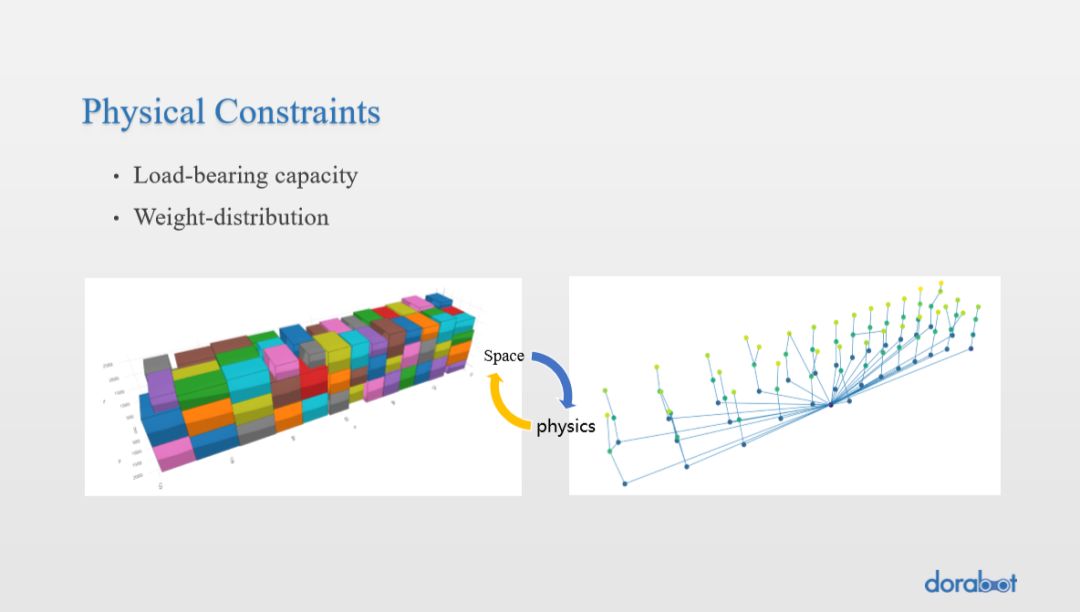
这类约束包括货物本身的承重能力要求,以及容器内部的重量分布。
三.机器人运动约束
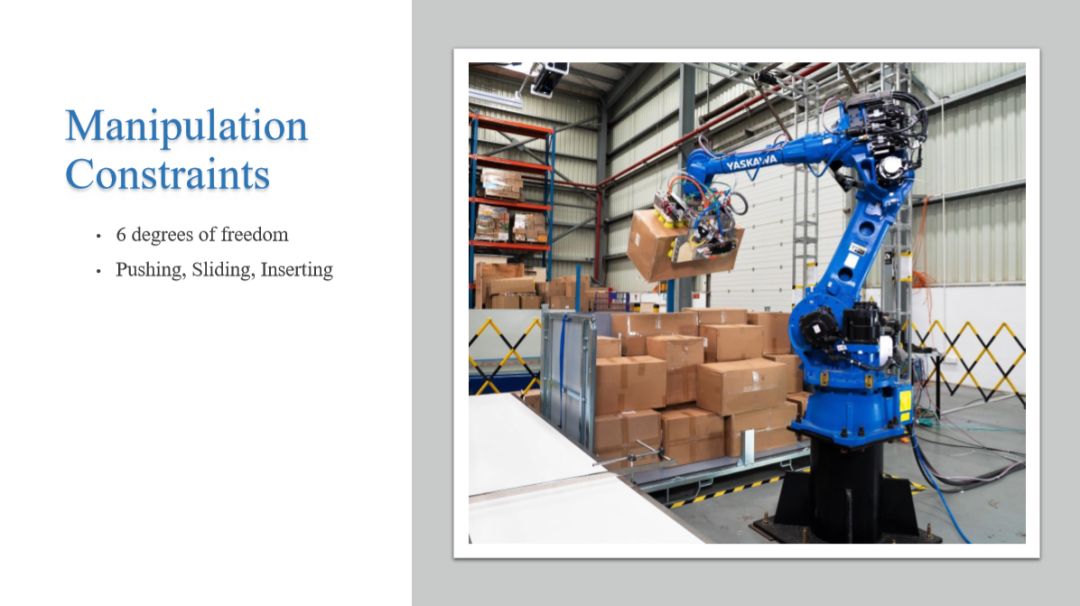
这类约束来自于机械臂的自由度制约。有些人类可以高效完成的动作对于机器臂会是困难的,如推、滑、塞等动作。
在蓝胖子机器人,针对此类问题我们采用“分而治之”的方法。
将一个有限空间迭代分割成多个子空间,设计一套好的离散空间表示方法以及一个作用于上且可收敛的本地优化器寻解。
在寻解同时,每个子问题可自然地形式化为一个特定的机器学习任务,以此在重复的、相似的场景中总结出最优的解决方式。
多智能体系统就是由一群拥有不同任务的智能体所构成的体系,难点在于如何优化整个系统的运作性能和效率。
我在这里利用一个分拣的场景来介绍在蓝胖子机器人我们是如何利用和优化多智能体系统的。
场景:分拣
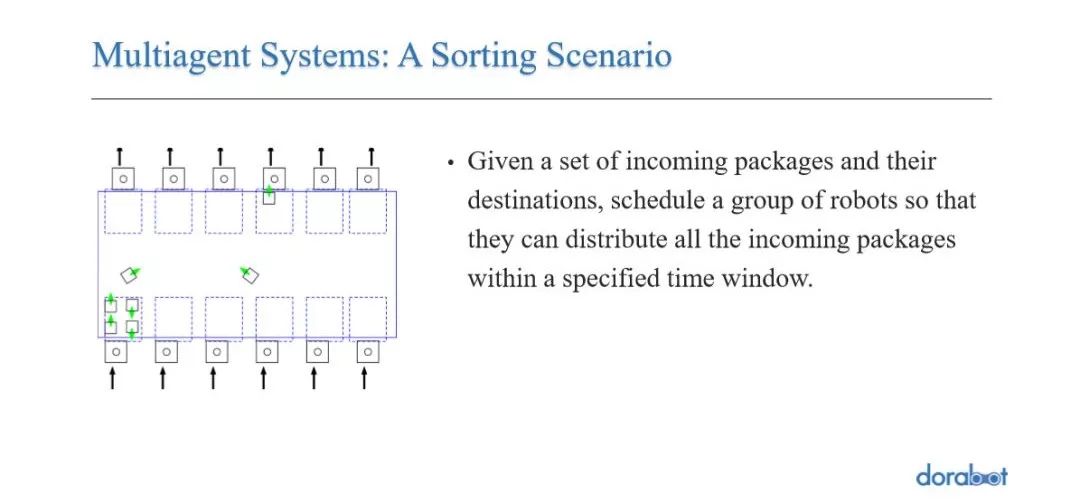
给定一堆传入的包裹,每个包裹都有对应的目的地,安排一组移动机器人,确保在指定的时间内完成所有包裹在仓库内的分拣和运输。
·理想状态
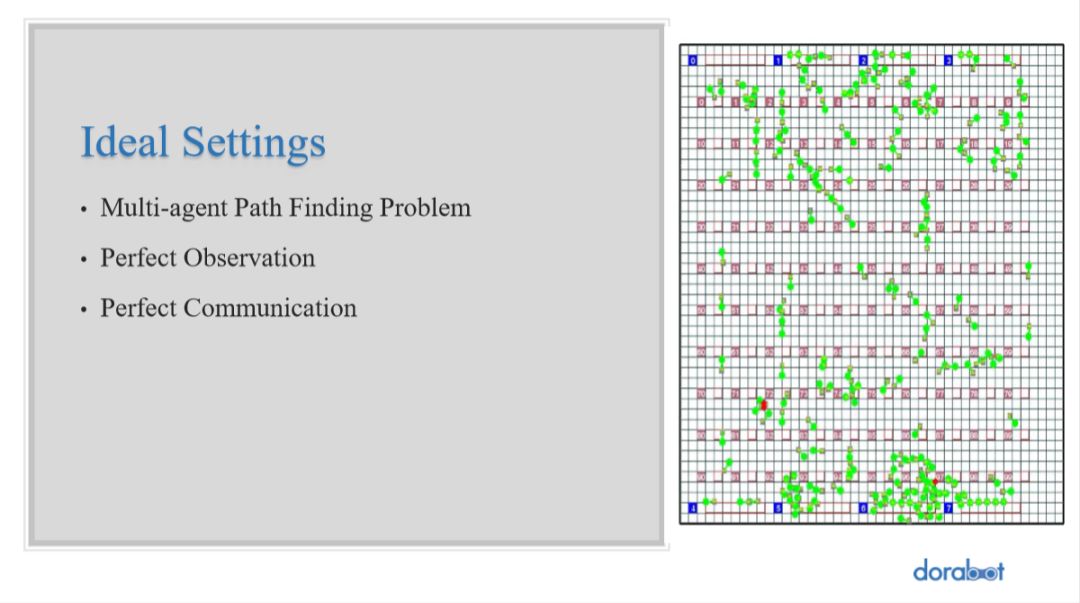
智能体能够进行自主路径规划,并实时感知周围环境,做出相应对策,例如是直行还是绕行,智能体之间能够无障碍交流。
·现实状态
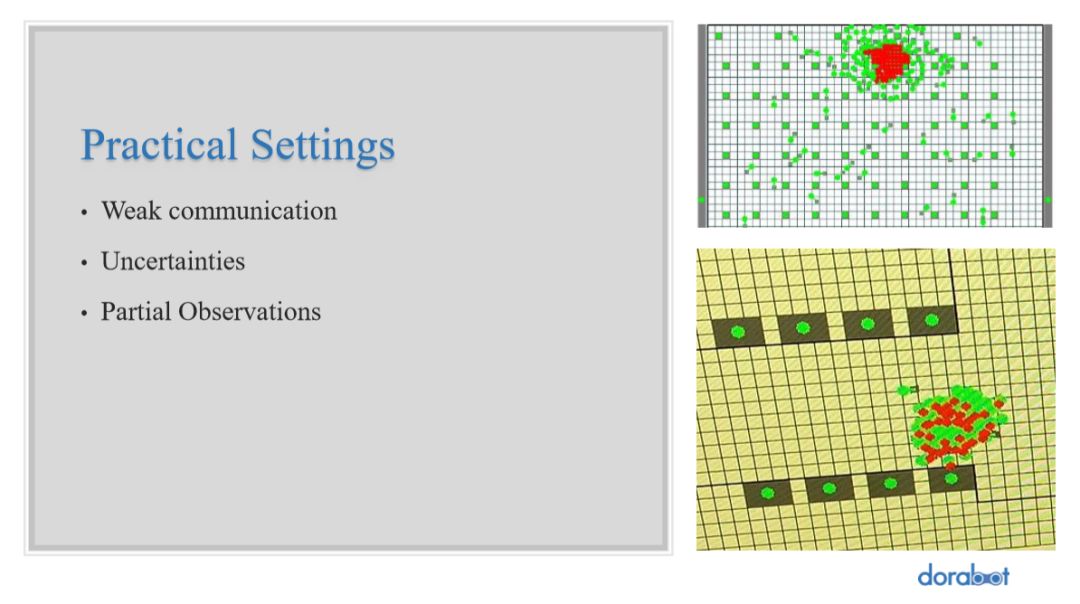
智能体只能感知部分环境,智能体之间交流微弱,场景中拥有多种不确定性。
对此,我们可采用以下解决方法:
(1)分层调度规划
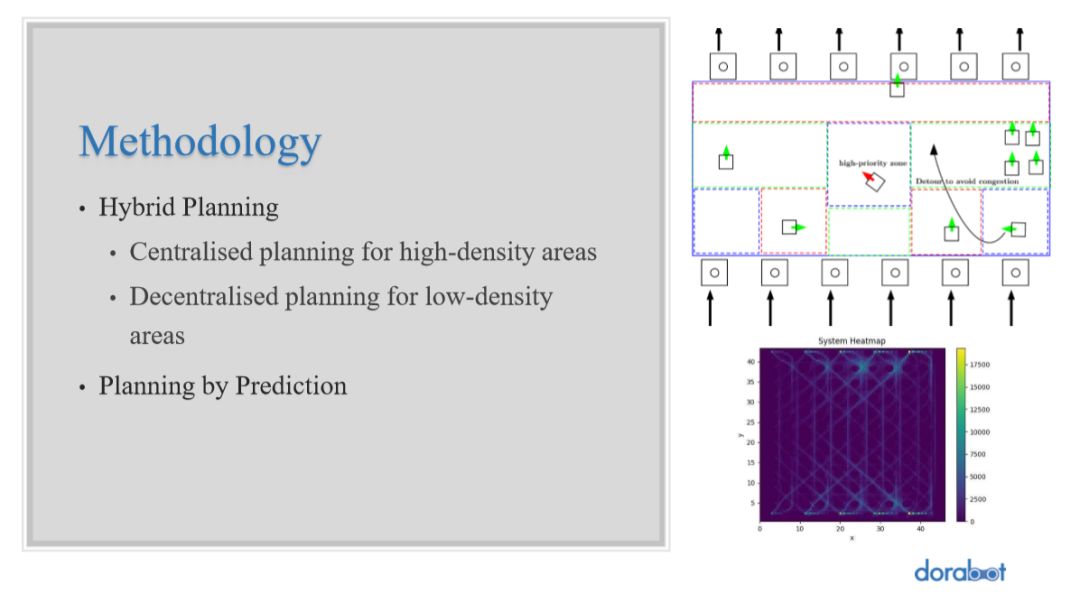
在智能体高密度区域采用中央调度规划,在智能体低密度区域采用去中央化规划,即依 靠智能体本身对环境的感知进行自主决策来执行任务。
(2)根据预测进行规划
在对历史数据及过程建模后,进行预测,采样分析系统热点区域,并进行规划。
(3)运用智能体行为依赖而不是时间点依赖
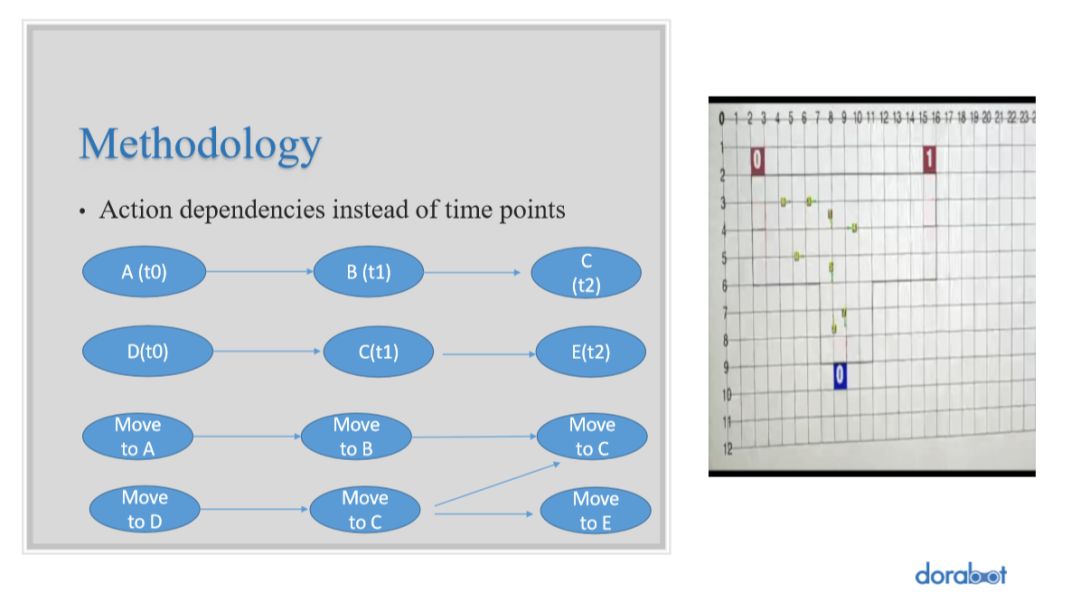
智能体在运行中因环境、控制、通讯的不确定性,往往很难在规定时间完成任务。
一个智能体不能按规定时间完成任务会对其他智能体乃至整个系统造成影响。
因此,我们的中央调度系统在制定规划时,用行为依赖关系去描述多智能体方案间的关系,从而适应在复杂环境中的不确定性。
在一个指定的空间中布局不同的模块(机器人模块,传统自动化模块,以及尚未自动化的人工模块),达到最佳运行效果。
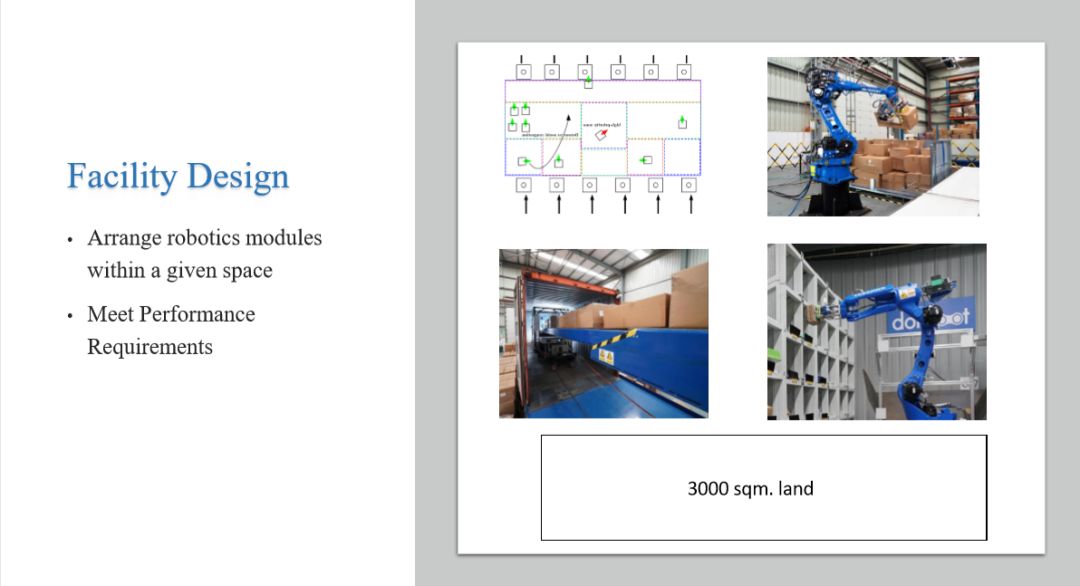
首先我们需要对系统建模并进行推演(Envision)。
推演的“演 ” 意在仿真。
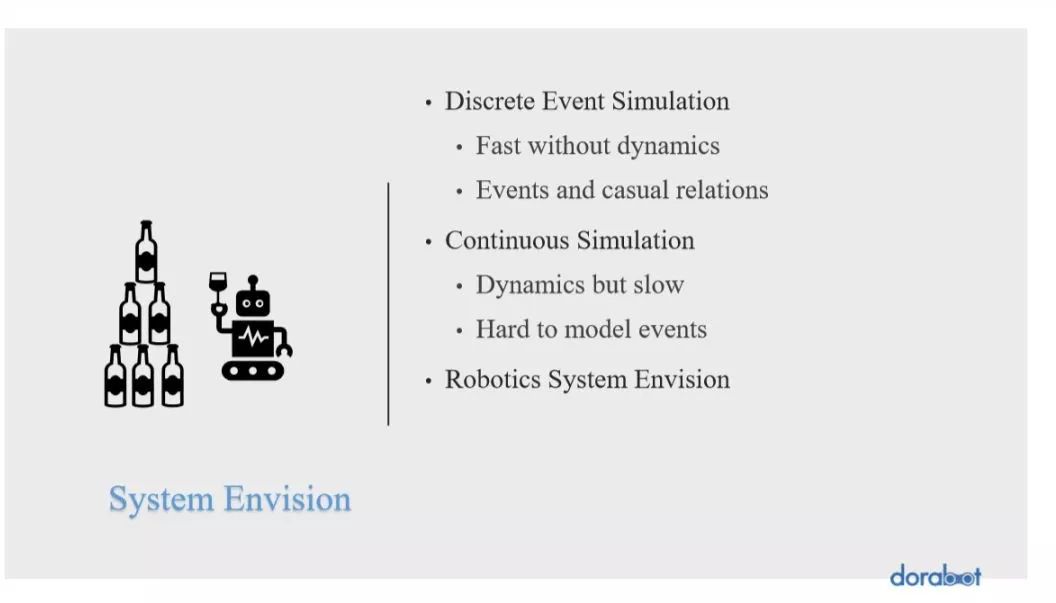
这里面包含离散事件仿真、连续环境仿真和机器人系统推演。
离散事件的仿真一般用于工业场景,可以自由地添加不同事件,并迅速得到系统演化结果,缺点是无法描述系统动力学状态。
连续环境仿真则是通过数值积分计算系统中的动力学状态,却无法完备地描述系统中可能出现的异常事件,且严密的仿真需要大量计算资源。
而在对机器人系统的推演中,我们既需要描述一个复杂系统的关键动力学特性,也需要完备地描述其可能产生的不同事件,并在有限的计算资源中对一个复杂的系统得出较为精确的结论。
因此,我们的机器人系统推演,可以大致理解为以上两种演化系统的结合。
推演的”推”,则体现为:针对一个特定机器人系统的演化结果,推理出演化结果的事件因果模型,并总结出可能的系统瓶颈及优化目标。
具备此推演工具后,我们就采用“黑盒优化”方法:
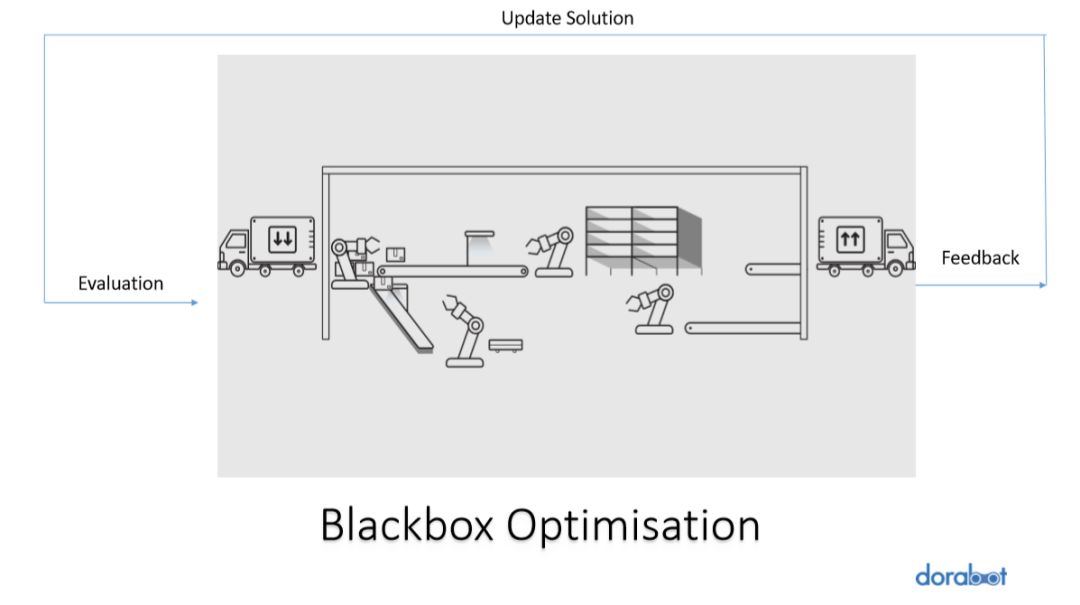
将整个场地看作一个黑盒,从一次完整的运行中获得反馈,针对薄弱之处进行优化,然后将优化的方案再放进黑盒中运行,迭代优化以达到满意的效果。
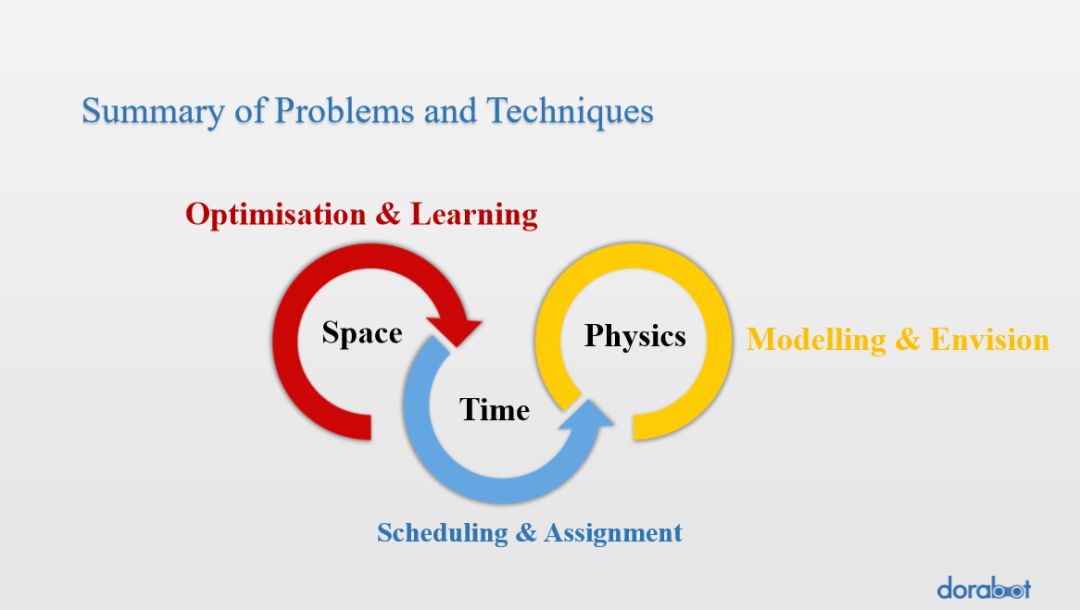
我们刚才谈了三类问题:组合优化问题,多机系统优化问题,以及场地设计问题。
我们可以从中概括总结出解决智能物流的方法,大体可归纳为:优化学习,调度分配以及系统推演在空间、时间、物理三个维度上的综合运用。
最后我想谈谈为什么AI技术需要具备可解释性。
当一个系统变得复杂时,能够理解系统行为背后的决策过程,能够在系统出现问题时及时发现问题根源,对系统的安全性与优化来讲都至关重要。
而且,对于大多数应用场景来说,机器人是和人一起协作的,这也要求其中的技术具有可解释性,便于人们监测和分析机器人的行为。
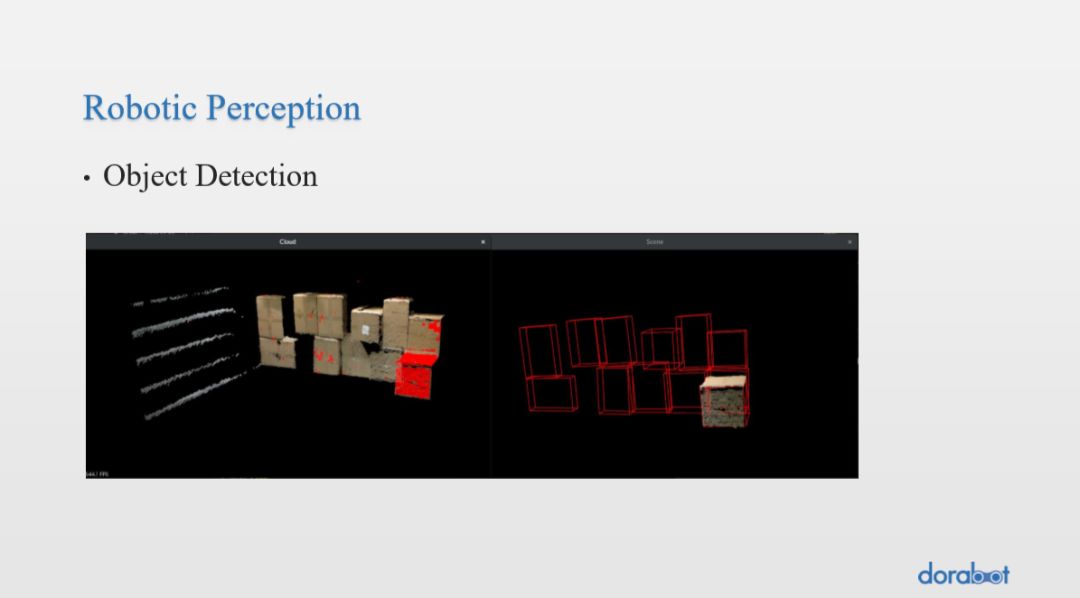
(机器人视觉可进行物体检测)
拿机器人感知来说,我们的技术可以进行物体检测,可以理解周围环境变化,还能提前预测某个动作可能造成的结果。
当一个机器人能够理解其周遭环境变化时,那么就为其描述自身动作对环境的影响带来了可行性。
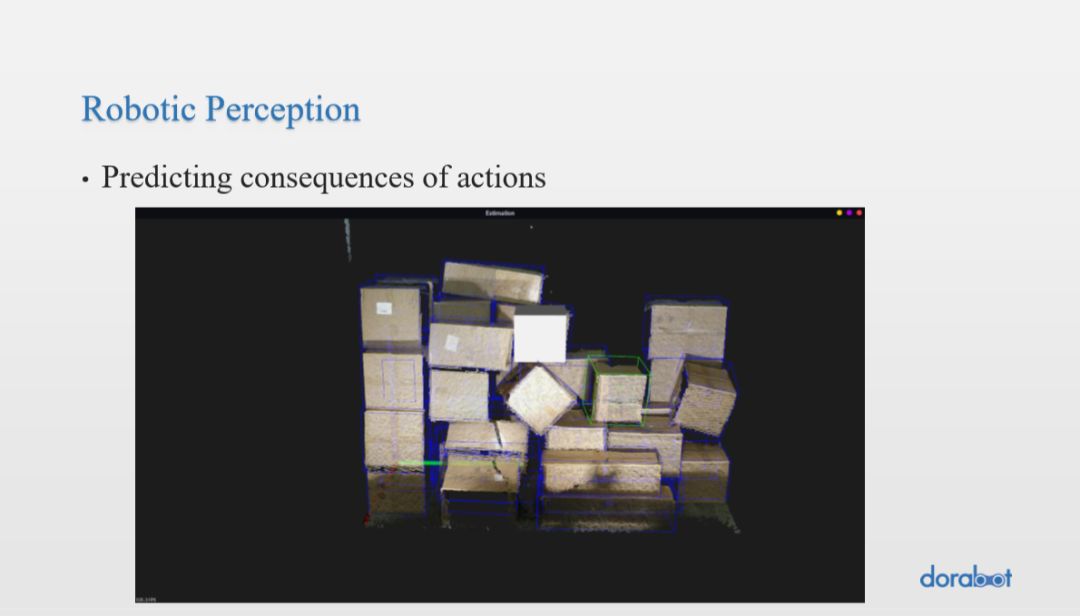
(机器人视觉可预测行为的结果)
因而,机器人在某种推理框架下作出一个决策时,这个决策能从感知、规划、和行动的层面上阐述出来,形成清晰的逻辑链。
我们在智能物流中积累的这些技术,包含机器人感知、运动规划、移动、操控等,都是可以通用的AI机器人技术,不仅能应用在物流机器人上,在未来也可以推广运用于工程建设机器人、农业机器人或者家庭服务机器人上。
综上所述,我此次的演讲可以作如下总结:
(1)物流领域是AI和机器人技术绝佳的试验田;
(2)组合优化和多智能体系统是两个可以快速进行工业化应用的研究课题;
(3)我们的愿景是打造通用型机器人,可以从物流行业延伸至其他应用场景。

我们非常欢迎有以上研究兴趣的高校学生和我们共同合作,一起突破学术上的难题,进而解决工业应用的挑战。有意者可直接发送邮件至info@dorabot.com.
本文转载自公众号“蓝胖子机器人Dorabot”,二次转载请联系原公众号。
机器人学家,不定期
手机长按下图二维码即可关注我们。






