【泡泡一分钟】基于感知的具有自适应步长补偿的仿人机器人运动系统
每天一分钟,带你读遍机器人顶级会议文章
标题:Perception Based Locomotion System for a Humanoid Robot with Adaptive Footstep Compensation
作者:Iori Kumagai, Mitsuharu Morisawa, Shin’ichiro Nakaoka,Takeshi Sakaguchi, Hiroshi Kaminaga, Kenji Kaneko, Fumio Kanehiro
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:黄思宇
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

自适应运动系统可保证使仿人机器人在执行有遮挡或有姿势约束的任务时,准确地到达目标位置。自适应运动系统包含定位、建立环境地图、全局运动规划和局部错误校正功能。在本文中,作者提出了一种构建基于感知的仿人机器人运动系统的方法。
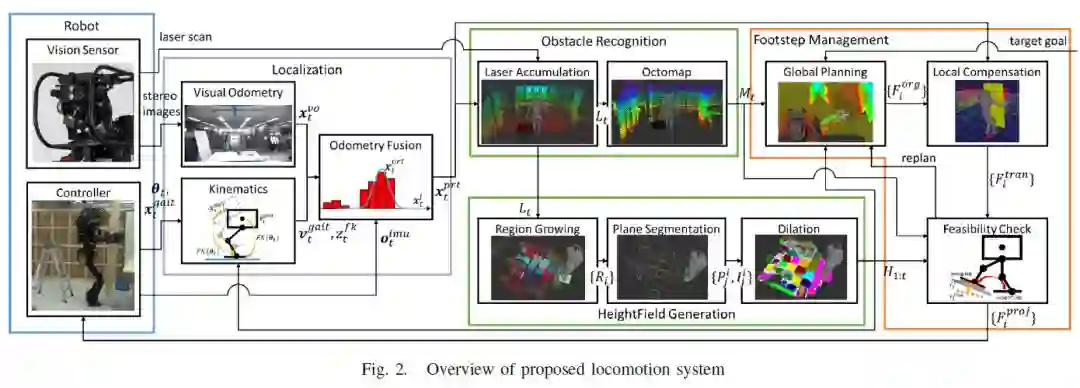
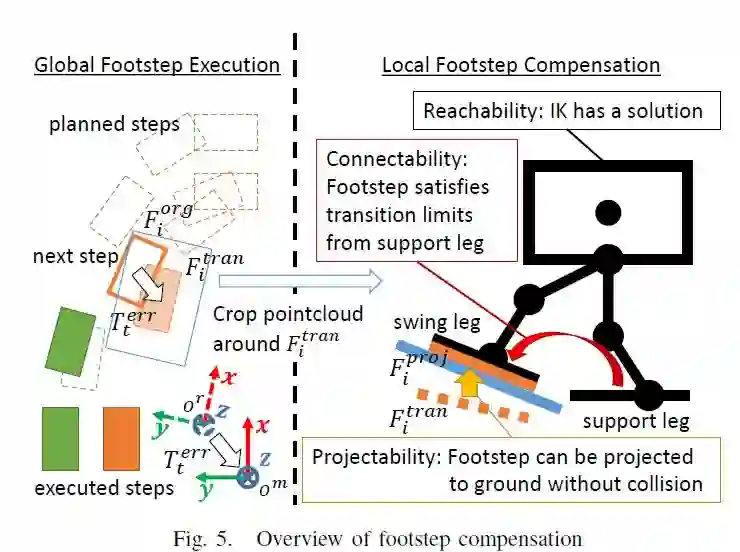
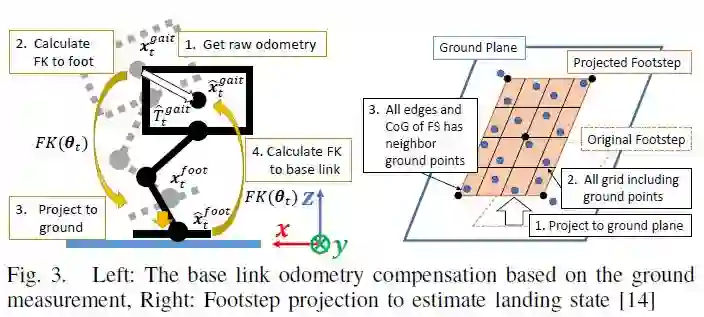
本文的主要的贡献是通过局部补偿步长、并基于对环境的测量实时地评估对全局步长重新规划的必要性,解决了由任务约束引起的运动误差问题。作者所提出的系统利用平面估计和空间插值,提供了精确且密集的地面点云(称为HeightField),并且通过累积的激光扫描数据提供用于避免碰撞的障碍物点云。这种环境感知使得仿人机器人即使处于视野受限的情况下,也能够在全局下规划并补偿步长,同时在线估计运动过程中的着陆状态。
本文介绍了对该系统的实用性的评估结果,将其用于在建筑工地中携带重物的仿人机器人来评估其实用性。
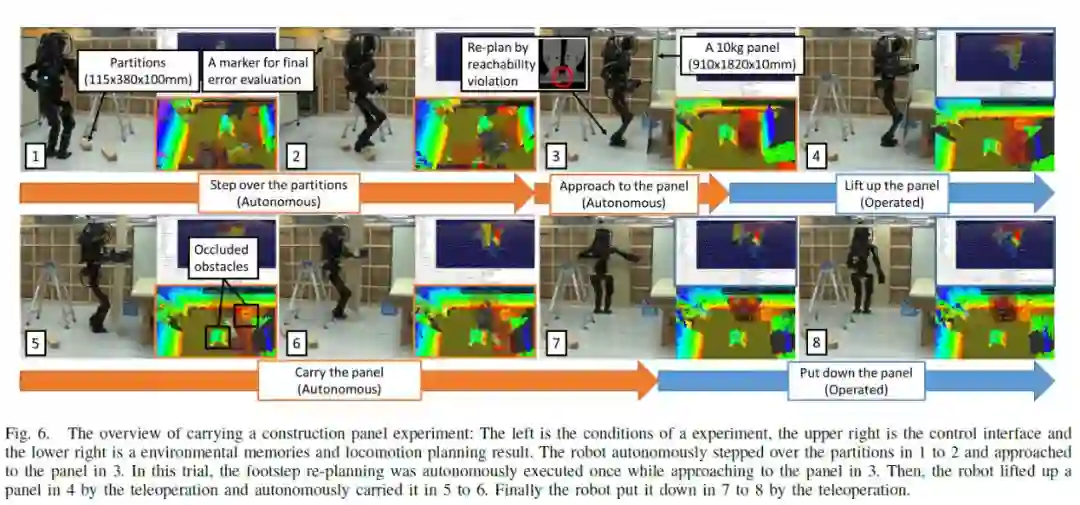
实验结果表明所提出的系统有助于改善从事重型或危险任务的仿人机器人的运动能力。

Abstract
In order to accurately reach a target position while executing a task which imposes occlusion or constraints of the posture, a humanoid robot requires an adaptive locomotion system, which can comprehensively integrate localization, environmental mapping, global locomotion planning and local error correction. In this paper, we propose a method of constructing a perception based locomotion system for a humanoid robot. The major contribution of this paper is solving a problem of the locomotion error caused by the task constraints, by locally compensating footsteps and assessing the need for global footstep re-planning online based on environmental measurements. The proposed system provides an accurate and dense ground point cloud, called HeightField, using plane estimation and space interpolation, and obstacle point cloud for frequent collision avoidance by accumulating laser scans. This environmental perception enables a humanoid robot to plan footsteps globally even in the situation where the sight of the robot is limited and compensate footsteps while estimating landing state during locomotion online with the localization result. We evaluated the practicality of the proposed system by applying it to our humanoid robot carrying a heavy object in a construction site and confirmed that the proposed system contributed to improved locomotion abilities of a humanoid robot engaging in heavy-duty or dangerous tasks.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




