浅析强化学习及使用Policy Network实现自动化控制
来源:极客头条
概要:强化学习已经有几十年的历史,但是直到最近几年深度学习技术的突破,强化学习才有了比较大的进展。
浅析强化学习
一个强化学习问题包含三个主要概念,即环境状态(Environment State)、行动(Action)和奖励(Reward),而强化学习的目标是获得最多的累计奖励。在围棋中,环境状态就是已经下出来的某个局势,行动是在某个位置落子,奖励则是当前这步棋获得的目数(围棋中存在不确定性,在结束对弈后计算的目数是准确的,棋局中获得的目数是估计的),而最终目标就是在结束对弈时总目数超过对手,赢得胜利。我们要让强化学习模型根据环境状态、行动和奖励,学习出最佳策略,并以最终结果为目标,不能只看某个行动当下带来的利益(比如围棋中通过某一手棋获得的实地),还要看到这个行动未来能带来的价值(比如围棋中外势可以带来的潜在价值)。
强化学习已经有几十年的历史,但是直到最近几年深度学习技术的突破,强化学习才有了比较大的进展。Google DeepMind结合强化学习与深度学习,提出DQN(Deep Q-Network,深度Q网络),它可以自动玩Atari 2600系列的游戏,并取得了超过人类的水平。而DeepMind的AlphaGo结合了策略网络(Policy Network)、估值网络(Value Network,也即DQN)与蒙特卡洛搜索树(Monte Carlo Tree Search),实现了具有超高水平的围棋对战程序,并战胜了世界冠军李世石。
DeepMind使用的这些深度强化学习模型(Deep Reinforcement Learning,DRL)本质上也是神经网络,主要分为策略网络和估值网络两种。深度强化学习模型对环境没有特别强的限制,可以很好地推广到其他环境,因此对强化学习的研究和发展具有非常重大的意义。下面我们来看看深度强化学习的一些实际应用例子。
我们也可以使用深度强化学习自动玩游戏,如图1所示,用DQN可学习自动玩Flappy Bird。DQN前几层通常也是卷积层,因此具有了对游戏图像像素(raw pixels)直接进行学习的能力。前几层卷积可理解和识别游戏图像中的物体,后层的神经网络则对Action的期望价值进行学习,结合这两个部分,可以得到能根据游戏像素自动玩Flappy Bird的强化学习策略。而且,不仅是这类简单的游戏,连非常复杂的包含大量战术策略的《星际争霸2》也可以被深度强化学习模型掌握。目前,DeepMind就在探索如何通过深度强化学习训练一个可以战胜《星际争霸2》世界冠军的人工智能,这之后的进展让我们拭目以待。
图1 使用深度强化学习自动玩Flappy Bird
深度强化学习最具有代表性的一个里程碑自然是AlphaGo。在2016年,Google DeepMind的AlphaGo以4:1的比分战胜了人类的世界冠军李世石,如图2所示。围棋可以说是棋类游戏中最为复杂的,19×19的棋盘给它带来了3361种状态,除去其中非法的违反游戏规则的状态,计算机也是无法通过像深蓝那样的暴力搜索来战胜人类的,要在围棋这个项目上战胜人类,就必须给计算机抽象思维的能力,而AlphaGo做到了这一点。

图2 AlphaGo代表了深度强化学习技术的巅峰
在AlphaGo中使用了快速走子(Fast Rollout)、策略网络、估值网络和蒙特卡洛搜索树等技术。图3所示为AlphaGo的几种技术单独使用时的表现,横坐标为步数,纵坐标为预测的误差(可以理解为误差越低模型效果越好),其中简单的快速走子策略虽然效果比较一般,但是已经远胜随机策略。估值网络和策略网络的效果都非常好,相对来说,策略网络的性能更胜一筹。AlphaGo融合了所有这些策略,取得了比单一策略更好的性能,在实战中表现出了惊人的水平。

图3 AlphaGo中随机策略、快速走子、估值网络和策略网络(SL和RL两种)的性能表现
Policy-Based(或者Policy Gradients)和Value-Based(或者Q-Learning)是强化学习中最重要的两类方法,其主要区别在于Policy-Based的方法直接预测在某个环境状态下应该采取的Action,而Value Based的方法则预测某个环境状态下所有Action的期望价值(Q值),之后可以通过选择Q值最高的Action执行策略。这两种方法的出发点和训练方式都有不同,一般来说,Value Based方法适合仅有少量离散取值的Action的环境,而Policy-Based方法则更通用,适合Action种类非常多或者有连续取值的Action的环境。而结合深度学习后,Policy-Based的方法就成了Policy Network,而Value-Based的方法则成了Value Network。
图4所示为AlphaGo中的策略网络预测出的当前局势下应该采取的Action,图中标注的数值为策略网络输出的应该执行某个Action的概率,即我们应该在某个位置落子的概率。
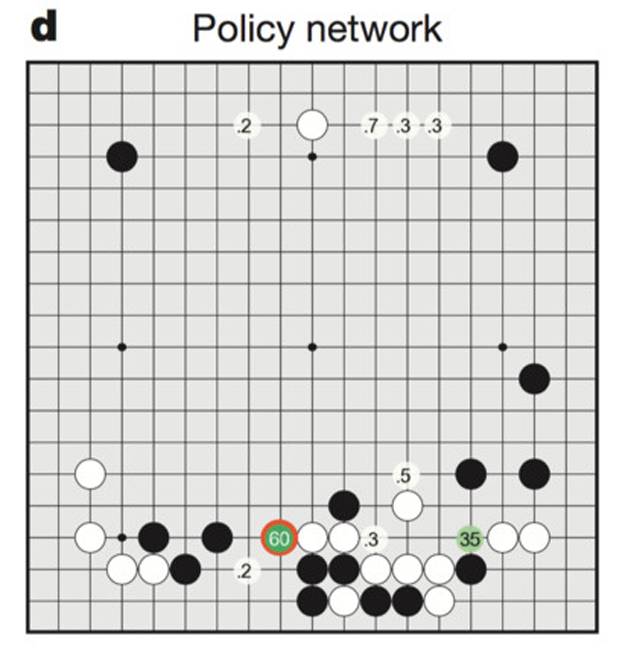
图4 AlphaGo中的策略网络,输出在某个位置落子的概率
图5所示为AlphaGo中估值网络预测出的当前局势下每个Action的期望价值。估值网络不直接输出策略,而是输出Action对应的Q值,即在某个位置落子可以获得的期望价值。随后,我们可以直接选择期望价值最大的位置落子,或者选择其他位置进行探索。
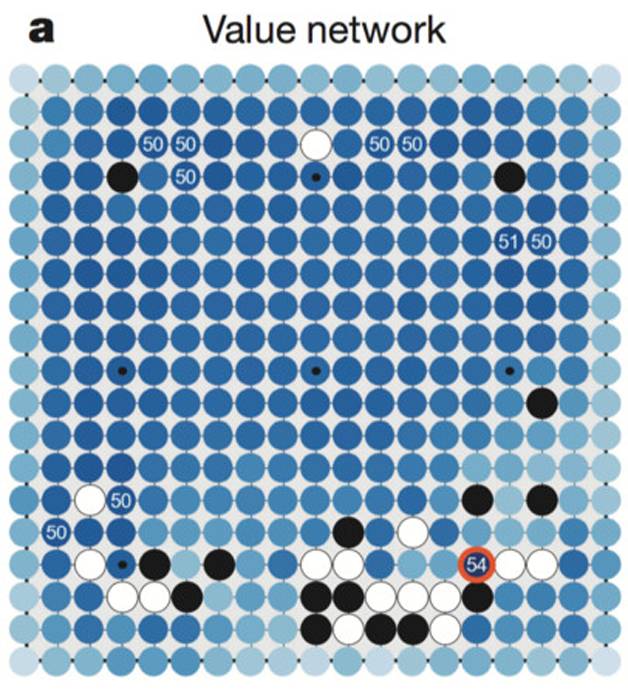
图5 AlphaGo中的估值网络,输出在某个位置落子的期望价值
在强化学习中,我们也可以建立额外的model对环境状态的变化进行预测。普通的强化学习直接根据环境状态预测出行动策略,或行动的期望价值。如果根据环境状态和采取的行动预测接下来的环境状态,并利用这个信息训练强化学习模型,那就是model-based RL。对于复杂的环境状态,比如视频游戏的图像像素,要预测这么大量且复杂的环境信息是非常困难的。如果环境状态是数量不大的一些离散值(m),并且可采取的行动也是数量较小的一些离散值(n),那么环境model只是一个简单的m×n的转换矩阵。对于一个普通的视频游戏环境,假设图像像素为64×64×3,可选行动有18种,那么我们光存储这个转换矩阵就需要大的难以想象的内存空间(25664×64×3×18)。对于更复杂的环境,我们就更难使用model预测接下来的环境状态。而model-free类型的强化学习则不需要对环境状态进行任何预测,也不考虑行动将如何影响环境。model-free RL直接对策略或者Action的期望价值进行预测,因此计算效率非常高。
使用策略网络(Policy Network)实现自动化控制
前面提到了强化学习中非常重要的3个要素是Environment State、Action和Reward。在环境中,强化学习模型的载体是Agent,它负责执行模型给出的行动。环境是Agent无法控制的,但是可以进行观察;根据观察的结果,模型给出行动,交由Agent来执行;而Reward是在某个环境状态下执行了某个Action而获得的,是模型要争取的目标。在很多任务中,Reward是延迟获取的(Delayed),即某个Action除了可以即时获得Reward,也可能跟未来获得的Reward有很大关系。
所谓策略网络,即建立一个神经网络模型,它可以通过观察环境状态,直接预测出目前最应该执行的策略(Policy),执行这个策略可以获得最大的期望收益(包括现在的和未来的Reward)。与普通的监督学习不同,在强化学习中,可能没有绝对正确的学习目标,样本的feature不再和label一一对应。我们需要让强化学习模型通过试验样本自己学习什么才是某个环境状态下比较好的Action,而不是告诉模型什么才是比较好的Action,因为我们也不知道正确的答案(即样本没有绝对正确的label,只有估算出的label)。我们的学习目标是期望价值,即当前获得的Reward,加上未来潜在的可获取的reward。为了更好地让策略网络理解未来的、潜在的Reward,策略网络不只是使用当前的Reward作为label,而是使用Discounted Future Reward,即把所有未来奖励依次乘以衰减系数γ。这里的衰减系数一般是一个略小于但接近1的数,防止没有损耗地积累导致Reward目标发散,同时也代表了对未来奖励的不确定性的估计。

我们使用被称为Policy Gradients的方法来训练策略网络。Policy Gradients指的是模型通过学习Action在Environment中获得的反馈,使用梯度更新模型参数的过程。在训练过程中,模型会接触到好Action及它们带来的高期望价值,和差Action及它们带来的低期望价值,因此通过对这些样本的学习,我们的模型会逐渐增加选择好Action的概率,并降低选择坏Action的概率,这样就逐渐完成了我们对策略的学习。和Q-Learning或估值网络不同,策略网络学习的不是某个Action对应的期望价值Q,而是直接学习在当前环境应该采取的策略,比如选择每个Action的概率(如果是有限个可选Action,好的Action应该对应较大概率,反之亦然),或者输出某个Action的具体数值(如果Action不是离散值,而是连续值)。因此策略网络是一种End-to-End(端对端)的方法,可以直接产生最终的策略。
我们需要使用Gym辅助我们进行策略网络的训练。Gym是OpenAI推出的开源的强化学习的环境生成工具。在Gym中,有两个核心的概念,一个是Environment,指我们的任务或者问题,另一个就是Agent,即我们编写的策略或算法。Agent会将执行的Action传给Environment,Environment接受某个Action后,再将结果Observation(即环境状态)和Reward返回给Agent。Gym中提供了完整的Environment的接口,而Agent则是完全由用户编写。
下面我们就以Gym中的CartPole环境作为具体例子。CartPole任务最早由论文《Neuronlike Adaptive Elements That Can Solve Difficult Learning Control Problem》提出,是一个经典的可用强化学习来解决的控制问题。如图6所示,CartPole的环境中有一辆小车,在一个一维的无阻力轨道上行动,在车上绑着一个连接不太结实的杆,这个杆会左右摇晃。我们的环境信息observation并不是图像像素,而只是一个有4个值的数组,包含了环境中的各种信息,比如小车位置、速度、杆的角度、速度等。我们可以采取的Action非常简单,给小车施加一个正向的力或者负向的力。我们有一个Action Space的概念,即Action的离散数值空间,比如在CartPole里Action Space就是Discrete(2),即只有0或1,其他复杂一点的游戏可能有更多可以选择的值。我们并不需要知道这里的数值会具体对应哪个Action,只要模型可以学习到采取这个Action之后将会带来的影响就可以,因此Action都只是一个编码。CartPole的任务目标很简单,就是尽可能地保持杆竖直不倾倒,当小车偏离中心超过2.4个单位的距离,或者杆的倾角超过15度时,我们的任务宣告失败,并自动结束。在每坚持一步后,我们会获得+1的reward,我们只需要坚持尽量长的时间不导致任务失败即可。任务的Reward恒定,对任何Action,只要不导致任务结束,都可以获得+1的Reward。但是我们的模型必须有远见,要可以考虑到长远的利益,而不只是学习到当前的Reward。
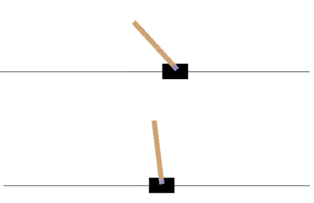
图6 CartPole环境中包含一个可以控制移动方向的小车和不稳的杆
当我们使用env.reset()方法后,就可以初始化环境,并获取到环境的第一个Observation。此后,根据Observation预测出应该采取的Action,并使用env.step(action)在环境中执行Action,这时会返回Observation(在CartPole中是4维的抽象的特征,在其他任务中可能是图像像素)、reward(当前这步Action获得的即时奖励)、done(任务是否结束的标记,在CartPole中是杆倾倒或者小车偏离中心太远,其他游戏中可能是被敌人击中。如果为True,应该reset任务)和info(额外的诊断信息,比如标识了游戏中一些随机事件的概率,但是不应该用来训练Agent)。这样我们就进入Action-Observation的循环,执行Action,获得Observation,再执行Action,如此往复直到任务结束,并期望在结束时获得尽可能高的奖励。我们可执行的Action在CartPole中是离散的数值空间,即有限的几种可能,在别的任务中可能是连续的数值,例如在赛车游戏任务中,我们执行的动作是朝某个方向移动,这样我们就有了0~360度的连续数值空间可以选择。
下面就使用TensorFlow创建一个基于策略网络的Agent来解决CartPole问题。我们先安装OpenAI Gym。本节代码主要来自DeepRL-Agents的开源实现。

接着,载入NumPy、TensorFlow和gym。这里用gym.make(‘CartPole-v0’)创建CartPole问题的环境env。

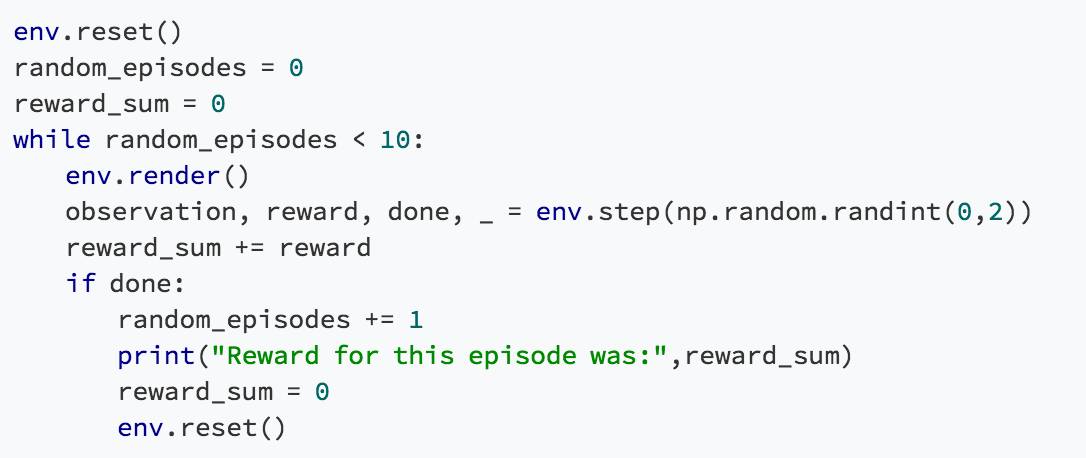
先测试在CartPole环境中使用随机Action的表现,作为接下来对比的baseline。首先,我们使用env.reset()初始化环境,然后进行10次随机试验,这里调用env.render()将CartPole问题的图像渲染出来。使用np.random.randint(0,2)产生随机的Action,然后用env.step()执行随机的Action,并获取返回的observation、reward和done。如果done标记为True,则代表这次试验结束,即倾角超过15度或者偏离中心过远导致任务失败。在一次试验结束后,我们展示这次试验累计的奖励reward_sum并重启环境。
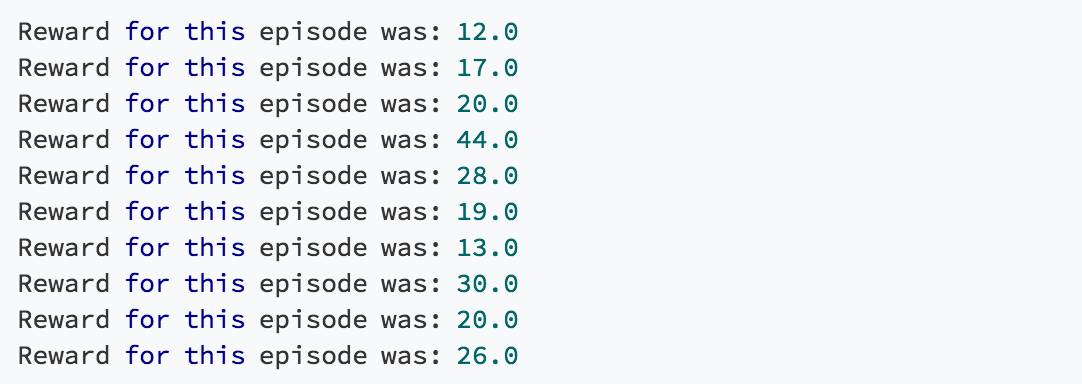
可以看到随机策略获得的奖励总值差不多在10~40之间,均值应该在20~30,这将作为接下来用来对比的基准。我们将任务完成的目标设定为拿到200的Reward,并希望通过尽量少次数的试验来完成这个目标。
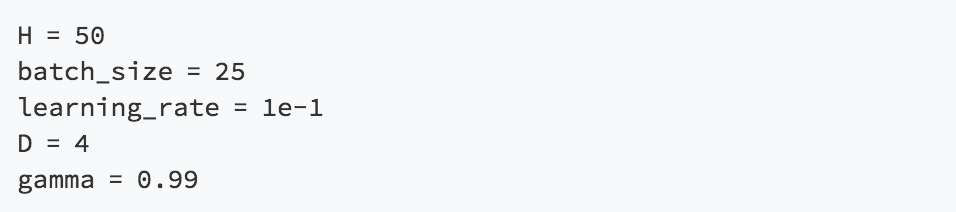
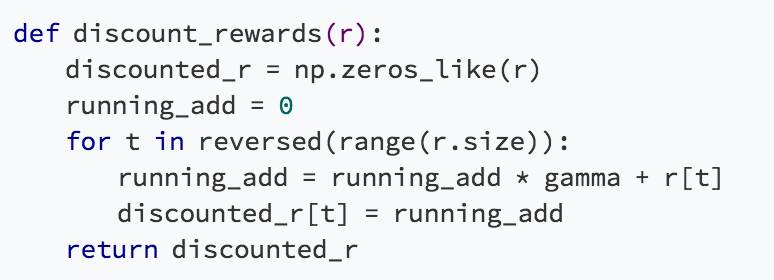
我们的策略网络使用简单的带有一个隐含层的MLP。先设置网络的各个超参数,这里隐含节点数H设为50,batch_size设为25,学习速率learning_rate为0.1,环境信息observation的维度D为4,gamma即Reward的discount比例设为0.99。在估算Action的期望价值(即估算样本的学习目标)时会考虑Delayed Reward,会将某个Action之后获得的所有Reward做discount并累加起来,这样可以让模型学习到未来可能出现的潜在Reward。注意,一般discount比例要小于1,防止Reward被无损耗地不断累加导致发散,这样也可以区分当前Reward和未来Reward的价值(当前Action直接带来的Reward不需要discount,而未来的Reward因存在不确定性所以需要discount)。
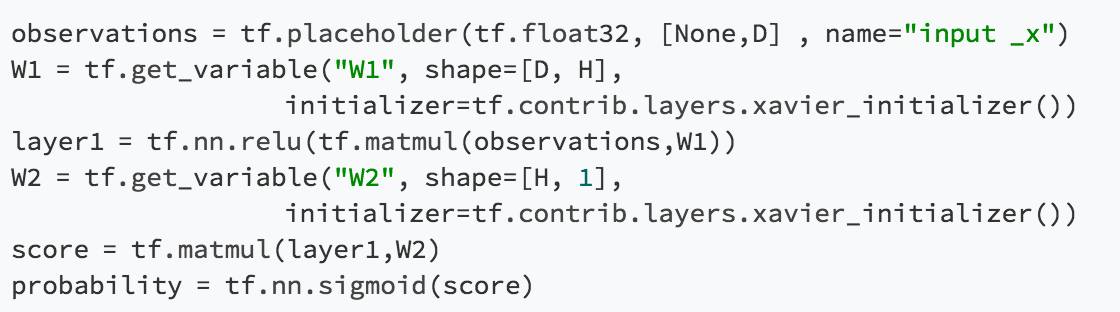
下面定义策略网络的具体结构。这个网络将接受observations作为输入信息,最后输出一个概率值用以选择Action(我们只有两个Action,向左施加力或者向右施加力,因此可以通过一个概率值决定)。我们创建输入信息observations的placeholder,其维度为D。然后使用tf.contrib.layers.xavier_initializer初始化算法创建隐含层的权重W1,其维度为[D, H]。接着用tf.matmul将环境信息observation乘上W1再使用ReLU激活函数处理得到隐含层输出layer1,这里注意我们并不需要加偏置。同样用xavier_initializer算法创建最后Sigmoid输出层的权重W2,将隐含层输出layer1乘以W2后,使用Sigmoid激活函数处理得到最后的输出概率。
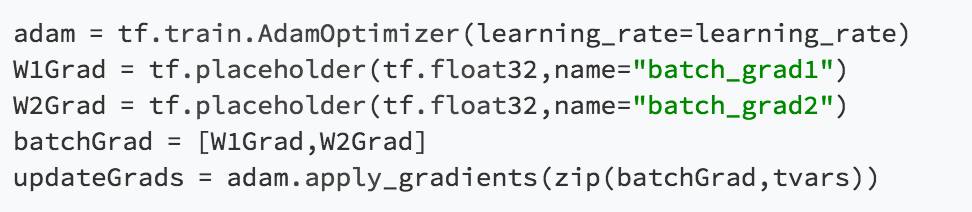
这里模型的优化器使用Adam算法。我们分别设置两层神经网络参数的梯度的placeholder——W1Grad和W2Grad,并使用adam.apply_gradients定义我们更新模型参数的操作updateGrads。之后计算参数的梯度,当积累到一定样本量的梯度,就传入W1Grad和W2Grad,并执行updateGrads更新模型参数。这里注意,深度强化学习的训练和其他神经网络一样,也使用batch training的方式。我们不逐个样本地更新参数,而是累计一个batch_size的样本的梯度再更新参数,防止单一样本随机扰动的噪声对模型带来不良影响。
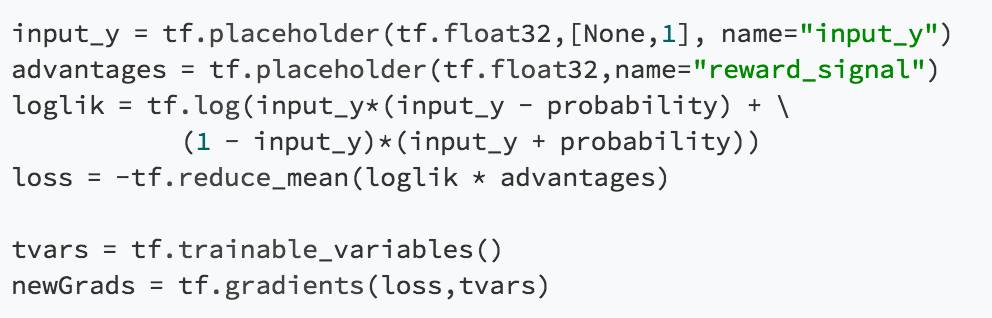
我们定义人工设置的虚拟label(下文会讲解其生成原理,其取值为0或1)的placeholder——input_y,以及每个Action的潜在价值的placeholder——advangtages。这里loglik的定义略显复杂,我们来看一下loglik到底代表什么。Action取值为1的概率为probability(即策略网络输出的概率),Action取值为0的概率为1-probability,label取值与Action相反,即label=1-Action。当Action为1时,label为0,此时loglik=tf.log(probability),Action取值为1的概率的对数;当Action为0时,label为1,此时loglik=tf.log(1-probability),即Action取值为0的概率的对数。所以,loglik其实就是当前Action对应的概率的对数,我们将loglik与潜在价值advantages相乘,并取负数作为损失,即优化目标。我们使用优化器优化时,会让能获得较多advantages的Action的概率变大,并让能获得较少advantages的Action的概率变小,这样能让损失变小。通过不断的训练,我们便能持续加大能获得较多advantages的Action的概率,即学习到一个能获得更多潜在价值的策略。最后,使用tf.trainable_variables()获取策略网络中全部可训练的参数tvars,并使用tf.gradients求解模型参数关于loss的梯度。
在正式进入训练过程前,我们先定义一些参数,xs为环境信息observation的列表,ys为我们定义的label的列表,drs为我们记录的每一个Action的Reward。我们定义累计的Reward为reward_sum,总试验次数total_episodes为10000,直到达到获取200的Reward才停止训练。

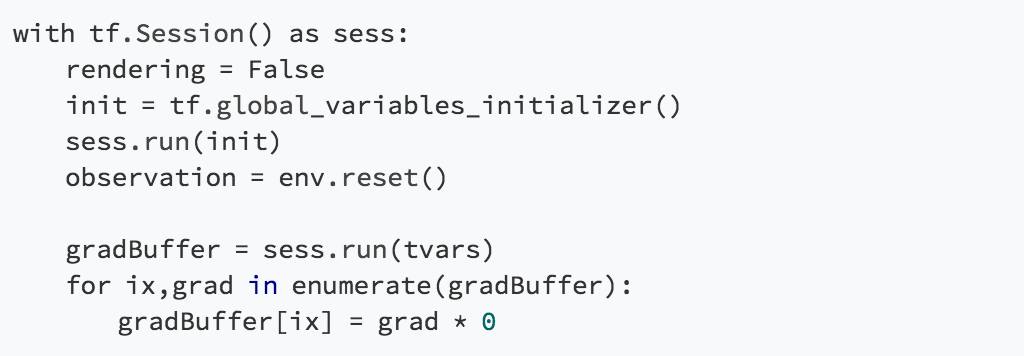
我们创建默认的Session,初始化全部参数,并在一开始将render的标志关闭。因为render会带来比较大的延迟,所以一开始不太成熟的模型还没必要去观察。先初始化CartPole的环境并获得初始状态。然后使用sess.run执行tvars获取所有模型参数,用来创建储存参数梯度的缓冲器gradBuffer,并把gardBuffer全部初始化为零。接下来的每次试验中,我们将收集参数的梯度存储到gradBuffer中,直到完成了一个batch_size的试验,再将汇总的梯度更新到模型参数。
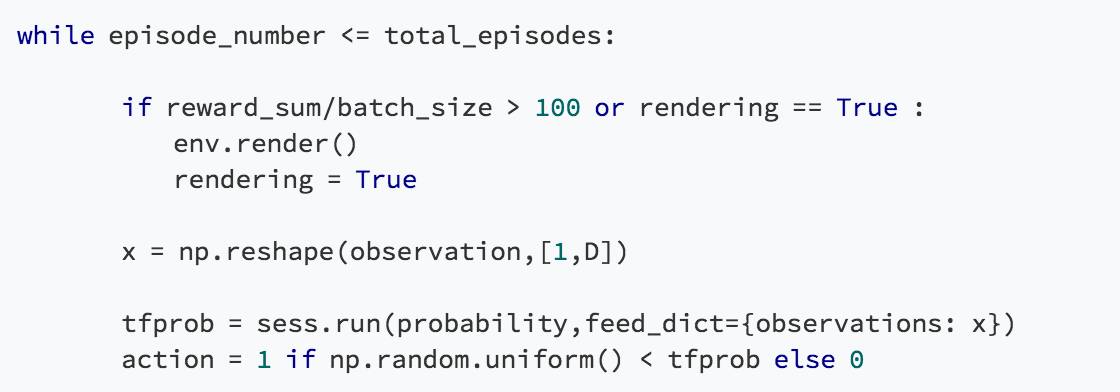
下面进入试验的循环,最大循环次数即为total_episodes。当某个batch的平均Reward达到100以上时,即Agent表现良好时,调用env.render()对试验环境进行展示。先使用tf.reshape将observation变形为策略网络输入的格式,然后传入网络中,使用sess.run执行probability获得网络输出的概率tfprob,即Action取值为1的概率。接下来我们在(0,1)间随机抽样,若随机值小于tfprob,则令Action取值为1,否则令Action取值为0,即代表Action取值为1的概率为tfprob。
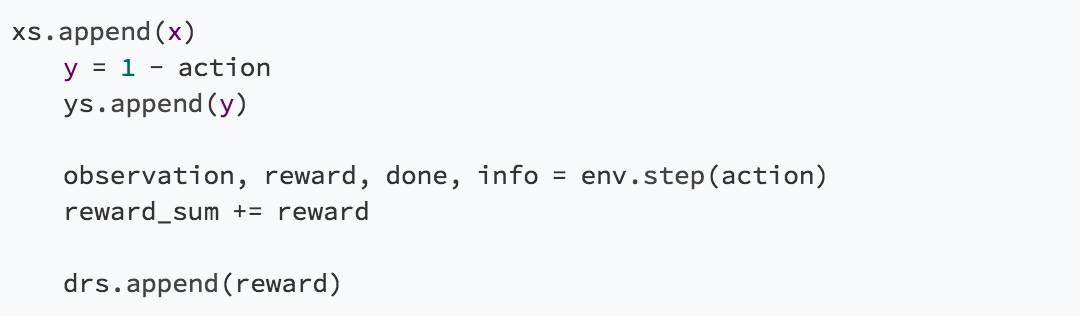
然后将输入的环境信息observation添加到列表xs中。这里我们制造虚拟的label——y,它取值与Action相反,即y=1-action,并将其添加到列表ys中。然后使用env.step执行一次Action,获取observation、reward、done和info,并将reward累加到reward_sum,同时将reward添加到列表drs中。
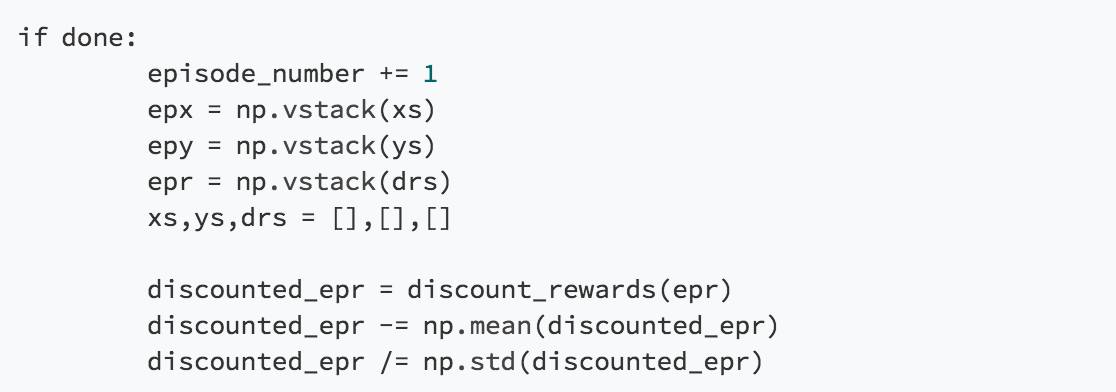
当done为True,即一次试验结束时,将episode_numer加1。同时使用np.vstack将几个列表xs、ys、drs中的元素纵向堆叠起来,得到epx、epy和epr,并将xs、ys、drs清空以备下次试验使用。这里注意,epx、epy、drs即为一次试验中获得的所有observation、label、reward的列表。我们使用前面定义好的discount_rewards函数计算每一步Action的潜在价值,并进行标准化(减去均值再除以标准差),得到一个零均值标准差为1的分布。这么做是因为discount_reward会参与到模型损失的计算,而分布稳定的discount_rewad有利于训练的稳定。
我们将epx、epy和discounted_epr输入神经网络,并使用操作newGrads求解梯度。再将获得的梯度累加到gradBuffer中去。

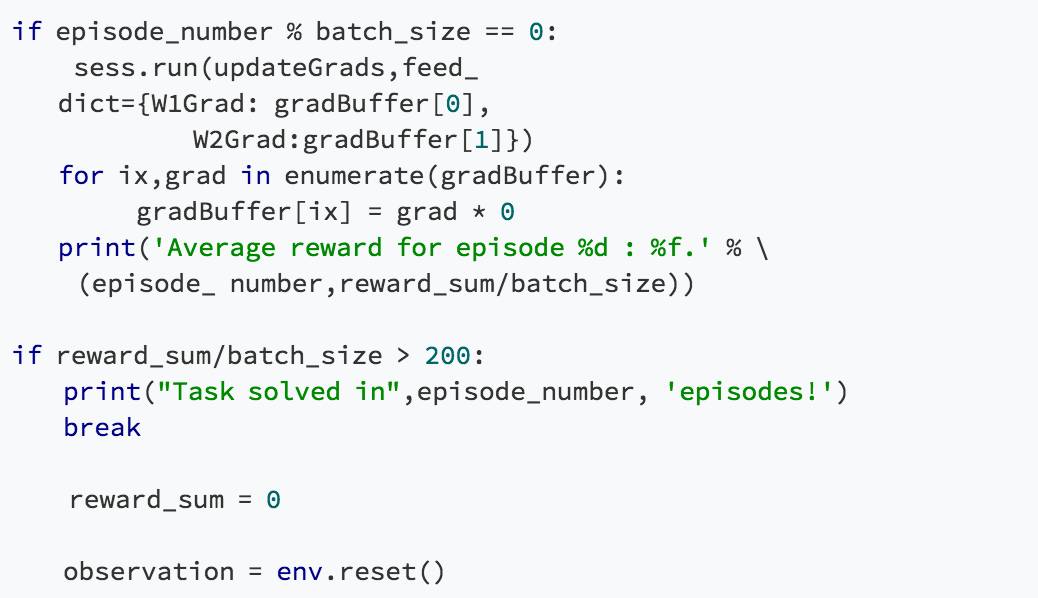
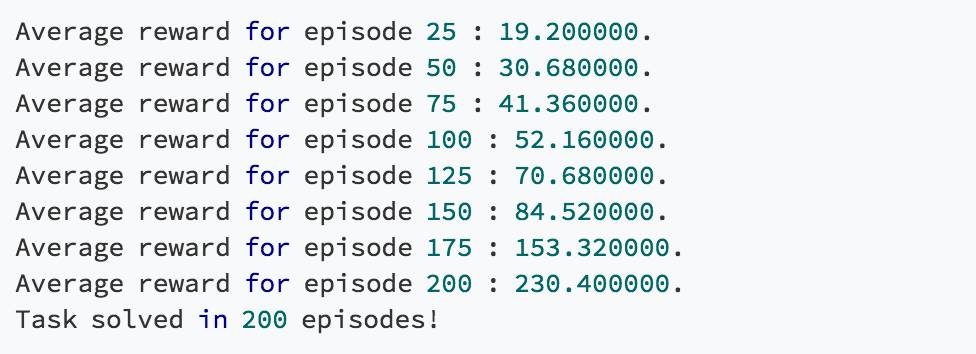
下面是模型的训练日志,可以看到策略网络在仅经历了200次试验,即8个batch的训练和参数更新后,就实现了目标,达到了batch内平均230的reward,顺利完成预设的目标。有兴趣的读者可以尝试修改策略网络的结构、隐含节点数、batch_size、学习速率等参数来尝试优化策略网络的训练,加快其学习到好策略的速度。
作者:黄文坚,PPmoney大数据算法总监。负责集团的风控、理财、互联网证券等业务的数据挖掘工作;Google TensorFlow Contributor;前明略数据技术合伙人。



