【团队新作】尾巴损伤,依然游出精彩——仿生鱼控制新进展

文章导读
近日,中国科学院自动化研究所复杂系统管理与控制国家重点实验室先进机器人控制团队,提出了针对多连杆仿生机器鱼的容错控制算法,该方法大幅改善了仿生机器鱼在尾关节损坏状况下的游动性能。
针对多连杆仿生机器鱼尾关节负载过大,容易发生故障这一实际问题,该团队首先分析了尾关节故障对机器鱼游动偏航角、速度产生的影响,以偏航角为反馈量,以多连杆机器鱼CPG模型(central pattern generator)偏置参数为控制量搭建了反馈控制系统。
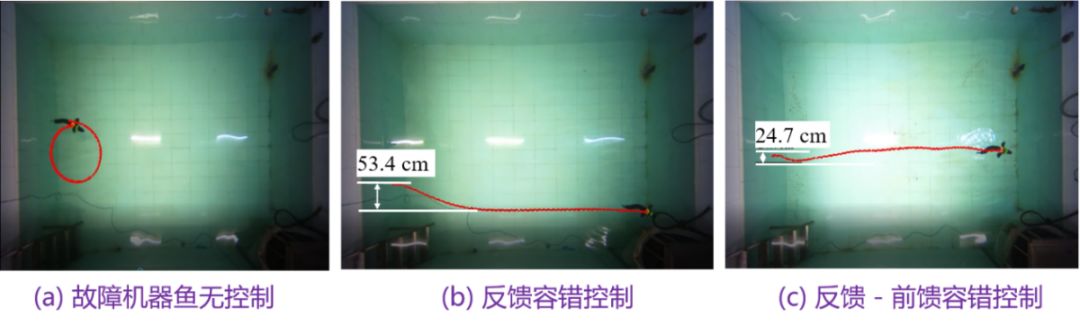
为了解决反馈控制系统中滤波器等环节造成的收敛速度慢的问题,该研究对机器鱼动力学模型进行了简化,并将故障状态的数学描述引入动力学模型,通过合理地构建优化函数、计算开环补偿,实现了融合动力学开环补偿的反馈偏航容错控制。开环补偿的引入大幅缩短了偏航容错控制的收敛时间。在实验过程中,直游指令下的机器鱼第三个尾关节被固定为20°,三种控制状态(无控制、反馈容错控制、反馈-前馈容错控制)的游动轨迹如下图所示。机器鱼在所提偏航容错控制方法的控制下能够在故障状态下维持偏航角稳定,验证了该策略的有效性。
在偏航容错控制的基础上,该团队发展了仿生机器鱼的速度容错控制。将速度量作为反馈并对CPG模型的角频率进行控制,进一步设计了游动状态稳定判断开关以削弱CPG参数之间的耦合效应对速度控制的影响。为了优化速度容错控制的收敛时间,研究采用了多层感知机拟合故障机器鱼动力学模型的逆模型。多层感知机以期望游动性能、故障状态为输入,以期望控制参数为输出,并且通过动力学模型采集训练数据用以训练该感知机。速度容错控制的有效性通过仿真实验得到了验证,机器鱼在所提控制方法作用下能在偏航角稳定的前提下达到指定速度。
针对仿生机器鱼的容错控制研究,对提升仿生机电系统稳定性及推动机器鱼的实际应用有重要的理论意义与实用价值。
相关研究成果发表在Engineering以及2018 IEEE International Conference on Underwater System Technology,并获最佳会议论文奖。论文第一作者杨越麒,指导老师喻俊志研究员。

Representation Learning - 表示学习:什么原因能够使一个表示比另一个表示更好?一个答案是一个理想的表示能够区分生成数据变化的潜在因果因子,特别是那些与我们的应用相关的因素。表示学习的大多数策略都会引入一些有助于学习潜在变差因素的线索。这些线索可以帮助学习器将这些观察到的因素与其他因素分开。监督学习提供了非常强的线索:每个观察向量x的标签y,它通常直接指定了至少一个变差因素。
更多精彩内容,欢迎关注
中科院自动化所官方网站:
http://www.ia.ac.cn
欢迎后台留言、推荐您感兴趣的话题、内容或资讯,小编恭候您的意见和建议!如需转载或投稿,请后台私信。
作者:孔诗涵
审稿:喻俊志
排版:亚岱尔
编辑:鲁宁






