
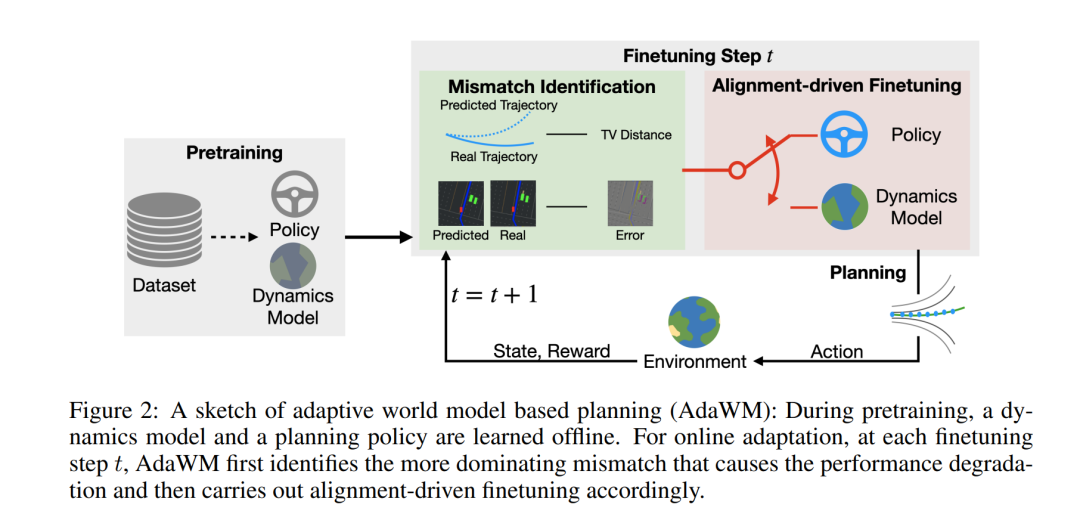
世界模型驱动的强化学习(RL)已成为自动驾驶领域一个有前景的方法,它通过学习潜在的动态模型,并利用该模型来训练规划策略。为了加速学习过程,通常采用预训练-微调范式,其中在线强化学习通过一个预训练的模型初始化,并且策略是在离线学习的。然而,在强化学习中简单地执行这种初始化可能会导致在新任务的在线交互过程中性能显著下降。为了解决这一挑战,我们首先分析了性能下降的原因,并识别出了其中的两个主要根本原因:规划策略的不匹配和动态模型的不匹配,这些问题源于分布变化。我们进一步分析了这些因素在微调过程中对性能下降的影响,研究结果表明,微调策略的选择在缓解这些影响方面起到了关键作用。接着,我们提出了AdaWM,一种基于自适应世界模型的规划方法,包含两个关键步骤:(a)不匹配识别,它量化了不匹配的程度并为微调策略提供指导;(b)基于对齐的微调,它根据需要选择性地更新策略或模型,并使用高效的低秩更新方法。通过在具有挑战性的CARLA自动驾驶任务上的大量实验,AdaWM显著改善了微调过程,从而在自动驾驶系统中实现了更强大且高效的性能。
成为VIP会员查看完整内容
相关内容
Arxiv
224+阅读 · 2023年4月7日


相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日