
当今,从潜艇舰载系统和外部来源获取的数据量已超出人类的感知和认知能力。作战环境的复杂性增加了人员的身心负荷;然而,人员招募的限制使得必须用有限的人力执行任务。因此,一个由数据驱动决策支持的指挥与控制信息系统(C2IS)对于潜艇上所有功能区域满足作战需求并利用技术优势而言是必要的。即将到来的“多域作战(MDO)”和“跨域指挥(CDC)”概念也要求这样的C2IS。在本研究中,为界定需求并识别解决方案的潜在领域,我们分析并分类了潜艇CMS作战需求的历史背景,确定了需求领域,定义了解決方案的基本方法,并建立了一个概念框架。作为研究结果,我们基于业务流程开发了一种数据驱动的“联合指挥与控制概念(第四代潜艇战斗管理系统(CMS))”。在该概念中,战斗系统的范围不限于作战、武器系统及传感器;而是将整个潜艇视为战斗系统。这实现了从第三代CMS基于设备的方法向功能和服务导向方法的转变,并定义了“作战智能”和“作战自主性”的能力。第四代潜艇CMS设想了一个整体性的指挥与控制信息系统,其目标不仅限于探测和鱼雷、导弹(G/M)发射的成功,还确保潜艇整个行动的成功。考虑到该概念所提出的方法旨在减少甚至消除对人类资源的需求,评估认为该概念也可应用于无人潜艇和无人水下航行器在平台自主性方面的指挥与控制,突出了潜在的应用领域。在潜艇控制室的布局和控制台设计中聚焦“人为因素”,以及UUV指挥中心,可改善团队合作和业务流程。“潜艇作战信息中心编排”设计满足了人为因素要求,并补充了第四代CMS概念的物理维度。该概念可应用于其他平台CMS、无人水面艇(USV)以及作战级C2IS。
联合指挥与控制概念(第四代潜艇战斗管理系统)
联合指挥与控制系统概念的支柱包括“整体方法”、“决策中心方法”和“联合方法”。整体方法基于潜艇作为战斗系统的所有传感器、设备、系统和业务流程。由于传感器、设备、系统和业务流程的重要性等级随当前情况而变化,因此认为它们对行动成功具有同等重要性。决策中心方法;考虑到潜艇的任务,要求开发的指挥与控制信息系统具备决策支持能力,能够基于数据提出各种行动方案并提交给潜艇指挥官和决策者。构成决策基础的数据和信息包括潜艇内部产生的以及潜艇接收的所有数据和信息。
联合方法;定义了数据和信息层面的连接,系统在此连接下协同工作以实现共同目标,同时保持各自的系统身份,其宗旨在于实现潜艇“整个行动全程成功”。[4] 联合指挥与控制概念提出了一种C2IS,其中潜艇本身是一个“战斗系统”,这远远超越了第三代CMS。
潜艇的作战效能取决于人员通过“标准操作程序(SOP)”(即从作战准备阶段开始的“业务流程”)在功能区域正确使用其技术系统的能力。(图2)

图2. 技术系统、人员与功能区域连接
潜艇的组织结构根据技术系统和人员的“功能区域”构建。尽管各国间可能存在细微差异,但潜艇组织中的功能区域通常体现为五个主要领域。这些领域被称为“作战与武器”、“情报”、“技术”、“后勤”和“人员”,人员利用系统时遵循为潜艇这些功能区域预定义的“标准业务流程”。潜艇从事从部署前准备到部署后活动的众多业务流程;使其动态化并成为作战的组成部分。(图3)
对业务流程中所用设备和系统的视角定义了该概念的基础。在该概念中,取代了第三代CMS的“基于设备的方法”,采用了“基于服务的方法”,涵盖执行潜艇作战的所有业务流程。为解释基于设备的方法和基于服务的方法之间的差异,以“WECDIS”和“拥挤/浅水水域导航业务流程”为例。WECDIS(军舰电子海图显示系统)是一种设备,或更准确地说,是一种信息系统。WECDIS使用输入的数据执行复杂计算,处理数据,并以视觉和数字格式呈现。拥挤/浅水水域导航业务流程归类于“作战功能区域”,包含众多步骤,涵盖了潜艇在浅水和拥挤水域航行时执行的活动。
在该概念中,焦点在于拥挤/浅水水域导航的整个过程及其他业务流程。WECDIS被视为一种从其他设备和业务流程收集数据的设备,生成用于拥挤/浅水水域导航过程部分及其他业务流程的数据。仅WECDIS设备不具备管理和执行“拥挤/浅水水域导航”业务流程所有步骤的能力和容量。拥挤/浅水水域导航业务流程及其构成的过程步骤由“作战服务”管理。类似地,包括WECDIS、平台监控与控制系统(工程监控与控制系统,EMCS)、操舵控制台、第三代CMS本身以及潜艇中所有其他设备和系统,都为潜艇功能区域执行的业务流程产生数据和信息。
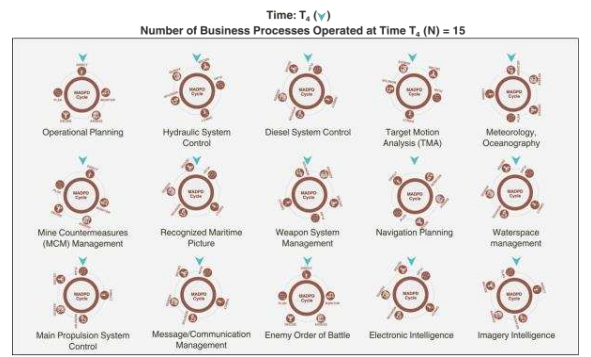
图3. 部分潜艇指挥与控制(MADPD)回路。
