
随着战场上机器人的出现,海军陆战队必须在海军陆战队空地特遣部队(MAGTF)行动中将现有的无人资产与有人系统进行战术整合。与此同时,海军陆战队还必须放眼未来,找出未来无人系统可能弥补的能力差距。要做到这两点,需要进行广泛的实地测试,而这往往是不可行的,而且总是成本高昂。这项工作建议使用虚拟环境 (VE)、虚拟现实 (VR) 和基于智能体的建模来对作战行动中的有人-无人协同作战 (MUM-T) 进行基于场景的评估。
为了实现这些目标,该项目研究了各种相关的战术场景,在这些场景中,海军陆战队员和机器人协同行动,以实现特定的任务目标。利用确定性作战模拟对这些战术场景进行进一步评估,从而在每个特定场景的问题空间内创建和评估行为的有效方法。由于特定的 MUM-T 战术、技术和程序(TTPs)会随着传感器、通信和车辆能力的不断提高而不断演变,因此支持完整的战斗模拟被认为是 VE 设计探索的必要组成部分。通过建立 MOVES 实时虚拟建构(LVC)实验室来支持这种多样性,以便使用各种模拟工具。此外,还考虑了两种协调有人-无人机团队(MUM-T)行为的一般方法,每种方法都从预期行为的高层次描述开始。目标任务的完成表明人机联合团队达到了预期的世界状态。
这项研究调查了大量作战模型和可视化工具,为海军陆战队决策者创造了最佳和最广泛的环境,以了解 MUM-T 战斗空间的复杂性和作战价值。更广泛地说,共享 VE 有可能在部队发展过程中用于规划将人机团队整合到海军作战部队中。由于国防部普遍不熟悉此类行动,但又热切期待其发展,因此很明显,使用实时、虚拟、建设性(LVC)模拟来对这些能力进行兵棋推演对所有进展都至关重要。归根结底,这种人机协同开发是扩大海军/海军陆战队能力和避免海军/海军陆战队弱点的关键途径。
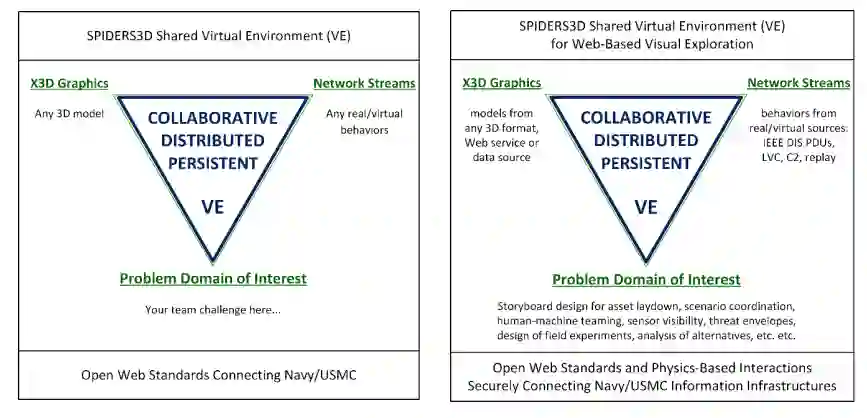
图 1. SPIDERS3D 是一种协作式分布持久虚拟环境 (VE),它利用 X3D 图形模型和基于 DIS 的网络流功能,从不同的 LVC 信号源传输数据。

