
在现代战斗中引入机器人与自主系统(RAS)似乎是不可避免的,其优势显而易见,如降低风险和扩展人员。本研究选择了异构无人飞行器(UAVs)的持久侦察作为研究范围,这也是比较突出的应用之一。尽管在开发先进硬件和算法方面做出了不懈努力,但在现实世界中仍缺乏实际应用。根本原因似乎是最先进的算法不足以应对军事环境中的高动态性和不确定性。
目前,军方使用基于意图的指挥与控制(C2)来应对这些挑战,因为它们与作战有着内在的联系。因此,将 C2 的通信原理转换为适用于 RAS 的数学方法似乎大有可为,而基于意图的协调就是这种转换的结果。为了能够应对高动态性和不确定性,提出了三项要求。首先,需要有灵活性,以便就地修改解决方案。其次,需要对不可靠的通信具有鲁棒性;第三,需要可扩展性,以确保在更大的感兴趣区(AOI)和更大的无人机团队中也能保持性能。
单智能体侦察问题(SARP)和多智能体侦察问题(MARP)是访问频率和覆盖水平方法的紧凑组合,用于持久侦察。根据多机器人系统(MRS)团队合作和组织方面取得的进展,提出了一种协调方法。这种协调方法将 MARP 的 AOI 划分为更小的不相交子集,这样每个无人机就可以独立解决不同的 SARP。这项研究的主要贡献在于,这种协调方法基于意图发挥作用,实现了所需的灵活性、鲁棒性和可扩展性。为此,它构建了一个监督员层次结构,在重叠子集上执行分布式合作。该分布式问题使用新颖的复杂并发约束(CCB)来解决,CCB 是并发前向约束(ConcFB)的调整版本,适用于具有复杂局部问题的分布式约束优化问题(DCOP)。此外,在分支与价格的定价步骤基础上,通过将列生成应用于重新制定的 MARP 版本,生成了一个下限来对所获得的解决方案进行基准测试。
基于意图的协调在面对 AOI 的扰动时表现出了灵活性。特别是当变化比较分散时,无需立即修改整个解决方案。此外,如果由于通信失败而先发制人地终止合作,则可观察到针对由此产生的次优子集的鲁棒性。特别是对于层次结构中的较高层次,次优解决方案可以由较低层次的解决方案进行部分修正。最后,对于越来越大的问题实例,该方法的计算时间呈亚线性增长。因此,基于意图的协调提供了一种令人兴奋的方法,即使在更具挑战性的环境中也能保持 RAS 的性能。

图 1.1: 将多智能体侦察问题(MARP)的 “感兴趣区域”(AOI)分割成更小的、互不关联的单智能体侦察问题(SARP)的示例
从根本上说,假定持久侦察可以通过求解多智能体侦察问题(MARP)来实现最优化,但考虑到军事环境的挑战,这并非易事。尽管如此,为了获得良好的解决方案,本论文尝试将基于意图的 C2 原则转换为一种数学方法,命名为基于意图的协调。这种协调方法旨在将 MARP 分割成更小的单智能体侦察问题(SARP),并分别求解。图 1.1 显示了无人机在不相交的 AOI 子集中联合优化路径和单独优化路径之间的差异。
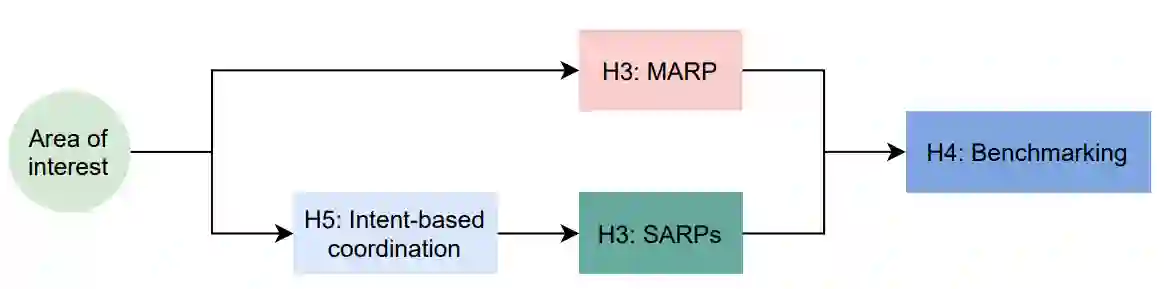
图 1.2:求解方法的总体描述。不是求解 MARP 达到最优,而是将 AOI 划分为更小的子集,以便单独求解更小的 SARP。使用基准方法对结果进行比较。
图 1.2 显示了总体结构。在给出 AOI 的情况下,基于意图的协调为多个 SARP 创建子集。合并后的结果应类似于 MARP 的最优解,这可以使用特定的基准方法进行评估。因此,本论文的主要贡献可以列举如下:
-
强调在现实作战环境中使用传统求解方法执行各类侦察任务的基本问题(第 2 章)。
-
将 SARP 和 MARP 表述为紧凑模型,结合频率和覆盖水平方法用于持续侦察(第 3 章)。
-
为了生成严格的下限,使用列生成法对 MARP 进行了松弛的重构求解,其中包括频繁求解初等最短路径问题(ESPP)。由于 MARP 的结构,必须包括循环距离,以及其他一些针对具体问题的调整,以改进前向标注[3](第 4 章)。
-
通过描述基于意图协调的分布式分层框架,解释基于意图的 C2 的转换(第 5-2 节)。
-
实施模糊 C-Means(FCM)[4],并增加后处理插值方法,对相关扇区特征进行权衡聚类,以降低问题的复杂性并适应传感器的异质性(第 5-3 节)。
-
制定一个任务分配问题,在智能体之间细分聚类,作为自上而下的启发式来创建子集。任务分配包括任务效用度量和新颖的二次任务依赖性约束,以适应有限的能力(第 5-4 节)。该方案被扩展为适用于分布式分层框架的合作方案(第 5-5-2 节)。
-
为了解决分布式合作公式,对并发前向边界(ConcFB)[5] 算法进行了调整,以适应复杂的局部问题,从而形成复杂并发边界(CCB)(第 5-5-5 节)。
-
全面分析,包括参数和组件性能,以及针对军事环境的具体定量评估。(第 6 章)。
