由于实弹演习可用性有限、成本高、风险大,空中和地面火力与机动的协调为模拟训练提供了理想的目标。目前的模拟系统为操作员提供任务导向型训练,但没有机会练习与其他机构的沟通和协调。本文采用分布式仿真工程和执行程序来指导仿真环境的创建,通过在一个逼真的联合武器场景中演示地面观察员、近距离空中支援、建设性水面火力和通信工具仿真的互操作性,来弥补这一训练能力上的差距。使用分布式交互仿真(DIS)标准和 ASTi Voisus 通信软件开发了一个仿真环境,其中包括波希米亚交互仿真公司的 VBS4、洛克希德-马丁公司的 PREPAR3D 和 Battlespace Simulations 公司的 MACE。虽然有一个研究虚拟专用网络(VPN),但 VPN 客户端之间无法支持 DIS 广播通信。模拟环境在本地网络上运行,远距离用户使用远程桌面连接。虽然 VBS4 存在性能问题,PREPAR3D 也不是近距离空中支援的理想选择,但 MACE 和 ASTi Voisus 表现良好,模拟环境取得了成功。对于物理分布式训练,建议采用高级架构 (HLA) 或多架构联盟。
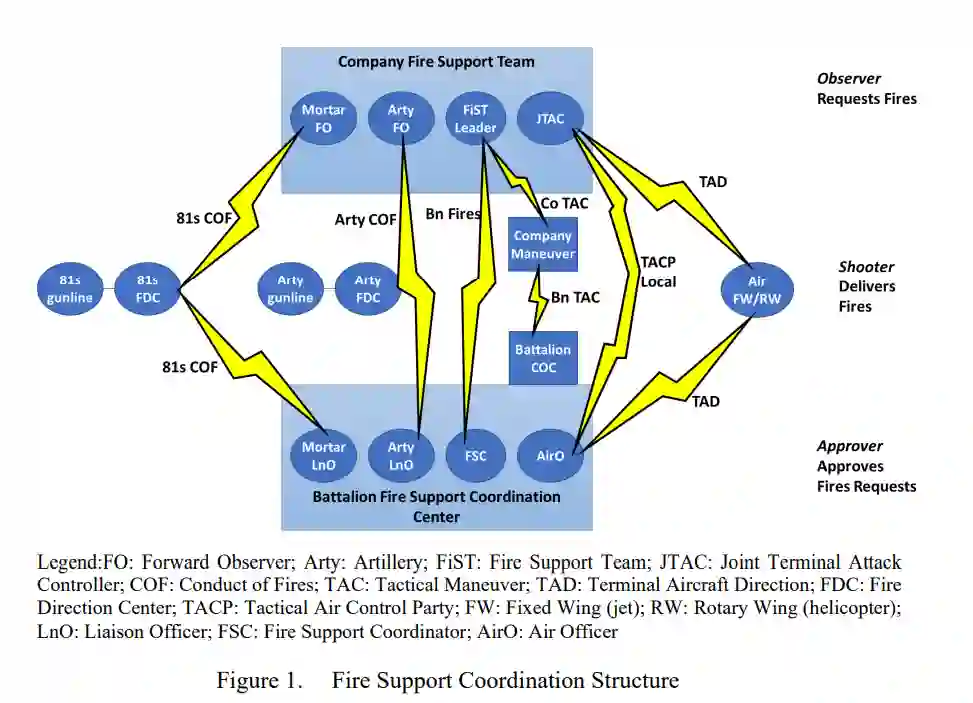
本文采用七步分布式仿真工程与执行流程(DSEEP)来指导仿真环境的规划、开发和执行(IEEE 计算机协会,2010a)。本论文分为以下几章。第二章--背景。本章讨论了火力支援协调训练所涉及的当前作战和训练组织、系统和角色。本章概述了海军陆战队当前的记录训练系统计划以及为实现互操作性所做的努力。最后,本章在概述 DSEEP 之前讨论了分布式模拟互操作性标准框架。第三章-方法。本章旨在记录 DSEEP 第 1-3 步的仿真环境规划。第 1 步--确定仿真环境目标,包括论文的初步规划、资源和期望。第 2 步-进行概念分析,涉及情景设计和所需模拟环境的更细化。第 3 步-设计仿真环境涉及仿真系统和集成仿真环境的详细规划。第四章--实施。本章包括 DSEEP 第 4-5 步中仿真环境的开发、集成和测试。第 4 步--开发仿真环境包括在每个仿真系统中实施场景,并确认网络和基础设施支持仿真环境要求。步骤 5-集成和测试仿真环境包括对每个仿真系统进行系统集成和测试,以确认所需的功能。随着问题的发现以及解决方案的开发和实施,本章涉及对模拟环境的多次更改。第五章--结果。本章记录了在 DSEEP 第 6-7 步指导下对模拟环境的执行和分析。步骤 6-执行模拟包括在模拟环境中全面演示培训场景的执行。第 7 步--分析数据和评估结果包括研究小组对成员应用的适用性、模拟环境的互操作性以及模拟环境在实现既定培训目标方面的整体有效性进行评估。第六章-结论。本章总结了研究结果,并提出了将该模拟环境应用于培训的建议和未来研究工作的建议。