美国海军正在重组其舰队结构。美海军正在探索使用无人潜航器 (UUV) 平台来补充舰队的可行性。目前的 UUV 只能提供最低限度的监视和水雷探测能力;一种解决方案是在 UUV 平台上增加攻击性和增强型探测能力。本研究采用基于模型的系统工程(MBSE)方法,在联合战区模拟级全球作战环境中探索具有增强能力的 UUV 的效果。该方法包括概念原型开发过程、作战概念、效果衡量标准、不同的 UUV 因素(速度、组成和声纳类型)以及实验设计。在对 540 次模拟运行的输出结果进行分析后,结果证明所有三个因素对 UUV 的作战性能都有重要影响,并表明使用先进的 UUV 可以提高特遣部队的能力。此外,实验还揭示了 UUV 的组成与探测和交战速度之间的强相关性,并证实了使用主动声纳在作战中的优势,从而形成了 UUV 功能的交换空间。这项研究证明了 MBSE 在为未来舰队进行可行性评估方面的实用性。
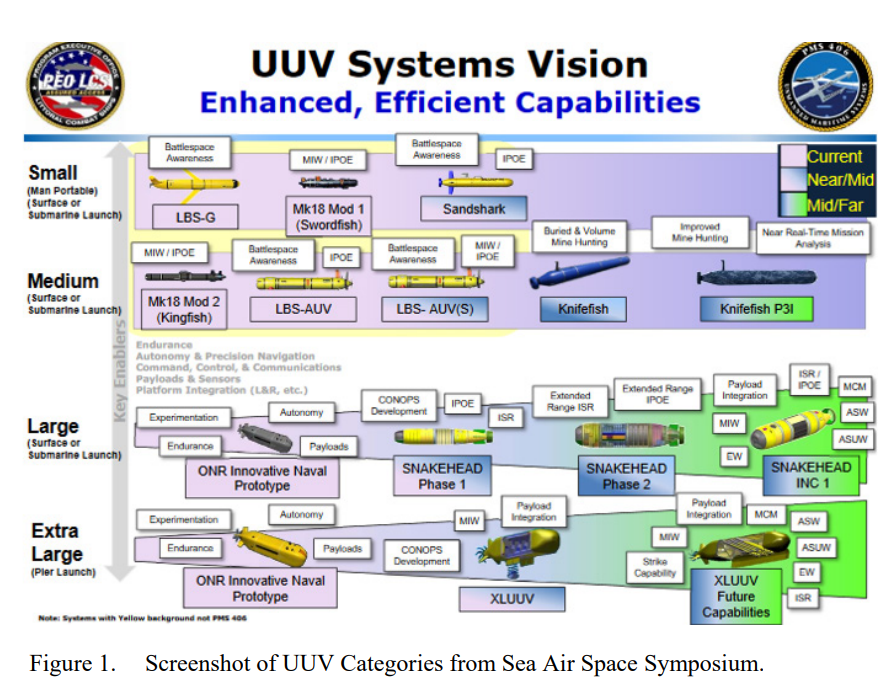
2016 财年,美国参议院军事委员会下令海军将舰队规模扩大到 355 艘。然而,建造设施的缺乏阻碍了这一工作。负责预算的海军副助理部长布莱恩-卢瑟少将估计,355 艘舰艇的目标要到 2050 年代才能实现(Larter 2018)。因此,美国海军正在探索潜在的舰队重组方案。海军对用无人系统来补充传统的有人海军资产非常感兴趣。无人潜航器 (UUV) 就是这样一种系统。由于高层对舰队和无人系统都很感兴趣,海军研究办公室(N9)要求提供测试 UUV 未来能力的方法和流程,以及开展此类研究的实验环境或工具。此外,目前的无人潜航器主要用于支持水雷战和小型监视任务(美国防部,2007 年),因此还不了解其对其他角色的影响。
本研究的目的是在计算机辅助兵棋推演中使用基于模型的系统工程(MBSE)方法,特别是联合战区级模拟全球行动(JTLS-GO),以探索先进的 UUV 能力作为未来美国海军舰队资产的影响,以及作为日益减少的潜艇部队的替代品的影响。
MBSE 方法是一个多步骤过程,从头至尾探索整个项目。通过这种方法,我们开发出了一种先进的 UUV 概念和 "眼镜蛇黄金 2018"(CG18)小插图或作战概念(CONOP),这是一种六国(太平洋司令部主办)指挥所演习(CPX)。小插图的创建允许对 CG18 进行反复检查,以确定 UUV 可以解决的能力不足问题。在这种情况下,虚拟演习的重点是敌方(索诺拉)特遣部队与盟军特遣部队(包括 USS Benfold (DDG-65) 和 RSS Endurance (LS-207))之间的互动。实际演习的结果包括上述舰艇的伤亡。造成这些伤亡的原因是缺乏态势感知和进攻火力。这些问题为在模拟中注入 UUV 以增强传感器和火力提供了机会和动力。随后,确定和建立新能力的作战要求和限制的过程随之展开。新的模拟 UUV 设计必须能够提供额外的进攻和侦察能力。衡量无人潜航器的性能如何以及哪些属性需要改变,从而制定了效能衡量标准(MOE)和性能衡量标准(MOPs)。这些衡量标准有助于指导实验设计(DOE)的制定,从而指导名义 UUV 的实验和评估。
性能指标包括探测效果和敌方减员。关注的性能因素(属性)包括 UUV 速度、UUV 数量(UUV 舰队组成)和声纳类型(主动或被动)。DOE 包括对这些因素在三个不同值(水平)下的测试。不同水平的因素组合产生了 18 个设计点。
JTLS-GO 模型是由 Rolands and Associates 设计的事件驱动兵棋推演模拟,用于测试多方联合战役和行动(Rolands and Associates 2018)。该项目测试战争的多个层面,包括政治、战略、作战和战术层面。
虽然 JTLS-GO 在模拟交战方面很有用,但根据 Cayirci 和 Marincic(2009 年)的说法,其功能是培训总部人员更有效地指挥和控制单元。因此,仅使用 JTLS-GO 测试未来概念是不可行的,因为这需要大量资源。为了充分利用 CG18 的人的反应和结果,作者在 NPS 仿真实验和高效设计(SEED)中心的帮助下,将原始 JTLS-GO 仿真程序转换为自动化计算机辅助兵棋推演(CAW)仿真。这种转换允许对未来能力进行多次重复模拟,以便进行统计分析。
这项工作涉及 540 次模拟运行,耗费了 810 个小时的计算机时间。通过回归分析、趋势分析和分区树分析,得出了以下结论:
1.通过在 JTLS-GO 中的 CG18 自动版本中建立建模和实验环境,MBSE 方法为评估未来 UUV 能力对作战的影响提供了途径。
JTLS-GO 中的 CG18 提供了一个框架,利用 MBSE 方法来定义操作差距、创建 UUV 原型、定义测量方式和内容(MOE 和因素)并快速进行实验。MBSE 所要求的有条不紊和一丝不苟的努力表明,应用这一过程有利于探索 UUV 的未来能力,同时也表明它如何为考察未来舰队的一系列能力提供机会。
2.UUV 的存在为提供态势感知和攻击火力提供了额外的能力,减少了水面的脆弱性。
即使增加了效果最差的因子组合的 UUV,也产生了积极的结果:3 个 "索诺兰 "单元被击毙,60% 的单元被发现。采用首选探测因子值的 UUV 使 RSS Endurance (LS-207) 在 30 次模拟中击沉了 12 次。与此同时,USS Benfold (DDG-65) 在使用这些 UUV 的 30 次模拟演习中只击沉了 2 次。当环境中存在具有优先损耗因子值的 UUV 时,RSS Endurance (LS-207) 在 30 次模拟中击沉了 10 次,USS Benfold (DDG-65) 在 30 次模拟中击沉了 2 次。因此,UUV 的性能导致模拟环境中盟军伤亡人数减少。
3.主动声纳提高了杀伤力和探测能力,但在速度和 UUV 舰队组成方面,并不是越多越好。
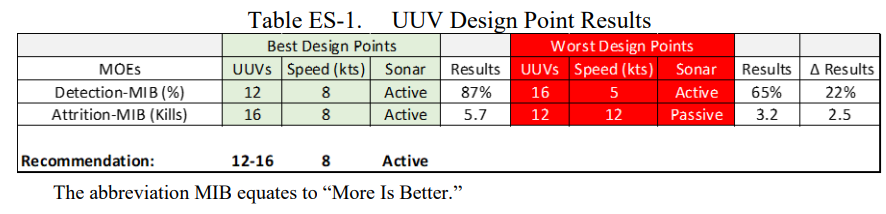
表 ES-1 列出了实验中最佳和最差的 UUV 配置。根据该表,推荐的最佳组合是一支中等规模的 UUV 舰队,以 8 节的速度航行并配备主动声纳。这种配置平均可摧毁近 88% 的敌方目标。
采用自动 JTLS-GO 仿真软件包的 MBSE 方法所得出的结果可为先进的 UUV 性能提供深入见解,而无需投入大量人力和物力。海军在规划其未来架构的过程中,应考虑使用此类工具对平台进行评估。此外,海军还应考虑增加先进的 UUV 平台以补充舰队。