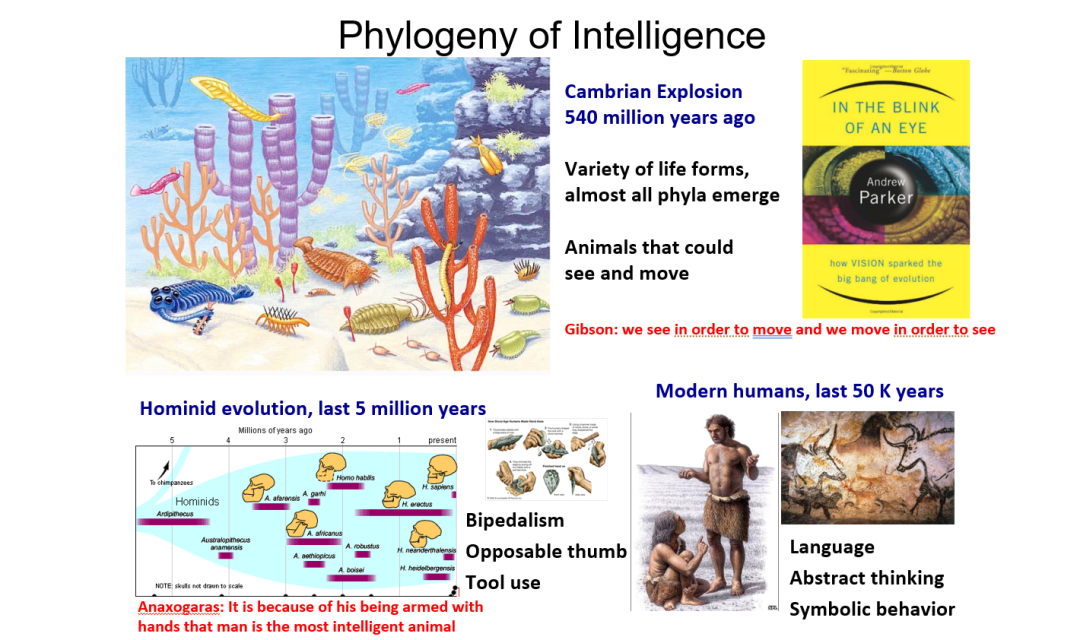
与计算机视觉和自然语言处理相比,机器人技术在深度学习革命中起步较晚,主要原因是“海量数据”并不像在其他领域中那样容易获得。然而,近年来已经取得了显著的进展,本课程的目的是为研究这些进展提供一个连贯的框架。 我的目标是构建能够模拟人类和其他动物在运动控制方面卓越能力的机器,运动控制被定义为在物理世界中将感知与行动连接起来。因此,本课程将明确偏向于以腿部代替轮子、以多指手代替平行钳式夹具、以丰富的视觉和触觉感知代替最基本的传感、以及将类人机器人带入家庭而非专用机器人停留在工厂车间。课程内容将分为三个主要部分:(1)生物学运动控制基础(作为灵感来源);(2)机器人运动技能获取的主要范式;(3)运动、导航和操控的案例研究。 第一讲A(9月9日) 介绍 第一讲B(9月9日) 步态与跑步的生物力学 第二讲A(9月16日) 机器人机制 - 运动学与动力学 [视频] 第二讲B(9月16日) 人类手部与灵巧物体操作 第三讲A(9月23日) 机器人手部 [视频] 第三讲B(9月23日) 本体感知与触觉感知 [视频] 第四讲A(9月30日) 动作感知中的视觉 [视频] 第四讲B(9月30日) 运动控制的发育视角 [视频] 第五讲A(10月7日) 机器人动力学、控制与运动规划 [视频] 第五讲B(10月7日) 计算神经科学视角下的预测与控制 [视频] 第六讲AB(10月14日) 强化学习 [视频A] [视频B] 第七讲AB(10月21日) 行为克隆 [视频] 第八讲AB(10月28日) 视觉模仿 [幻灯片A] [幻灯片B] [视频] 第九讲AB(11月4日) 步态案例研究 [幻灯片A] [幻灯片B] [视频] 退伍军人节(11月11日)
第十讲AB(11月18日) 导航案例研究 [幻灯片A] [幻灯片B] [视频] 第十一讲AB(11月25日) 灵巧操作案例研究 [视频A] [视频B] 第十二讲AB(12月2日) 长期规划与语言的作用 [视频A] RRR周(12月9日) 最终项目展示 [报名表]