
论文题目
发展儿童机器人的数字知识,Developing the knowledge of number digits in a child-like robot
论文简介
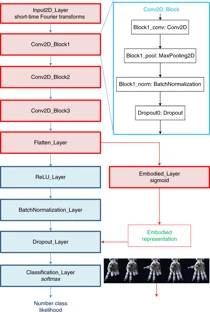
数字知识最初可以通过使用手指等具体策略来提高。本文探讨了人工智能体中数字符号接地的感知过程,特别是iCub机器人,它是一种功能齐全的五指仿人儿童机器人。它研究卷积神经网络模型在认知发展机器人中的应用,在认知发展机器人中,训练信息可能在操作时逐渐获得,而不是像在许多机器学习场景中那样丰富和完全可用。实验分析表明,训练的效率提高了,并且与发展心理学的研究有相似之处。事实上,来自机器人手的本体感知信息可以通过支持更快地创建统一的数字线来提高语音数字识别的准确性。综上所述,这些发现为人工训练策略的人性化提供了一种新的途径,使机器人的学习更有效,更易于人类理解。
论文作者
Alessandro Di Nuovo,英国谢菲尔德哈勒姆大学计算机系,谢菲尔德机器人学。 James L. McClelland,美国加利福尼亚州斯坦福大学心理、大脑与计算中心心理学系。 此外,A.D.N.对实验进行了概念化,开发了实验方法,并设计了基线人工神经网络结构。A.D.N.和J.L.M.合作设计了具体模型。A.D.N.实现了源代码,运行了模拟,验证了结果,并编写了文章的初稿。J.L.M.提供了认知心理学和神经科学的相关观点,并参与了讨论。
成为VIP会员查看完整内容
相关内容

专知会员服务
207+阅读 · 2020年2月16日
专知会员服务
17+阅读 · 2019年12月2日
Arxiv
7+阅读 · 2019年11月13日
Arxiv
3+阅读 · 2019年6月26日
Arxiv
3+阅读 · 2018年2月20日

相关VIP内容
专知会员服务
207+阅读 · 2020年2月16日
专知会员服务
17+阅读 · 2019年12月2日
相关资讯
相关论文
Arxiv
7+阅读 · 2019年11月13日
Arxiv
3+阅读 · 2019年6月26日
Arxiv
3+阅读 · 2018年2月20日