
认知雷达能持续感知环境、与环境互动并从中学习。这种范例可应用于多功能雷达(MFR),后者可执行多种功能,如监视、跟踪和通信等。为了执行这些任务,雷达资源管理(RRM)模块将可用资源分配给这些功能,同时考虑任务参数,包括优先级。本报告介绍的工作重点是时间窗口内的任务调度问题。对于时间资源而言,RRM 尤其具有挑战性,因为 1) 任务要求可能极为不同,具有多个优先级类别;2) 调度策略应能适应动态环境。适应非稳态环境是认知雷达的一个关键优势。
本报告中介绍的第一项工作旨在应对这两项挑战,首先是为任务参数的分布制定一个相当通用的模型,具体包括任务优先级和延迟容忍度;其次是在深度强化学习(DRL)框架内应用迁移学习(TL),以适应不同的环境。这种方法的基础是在深度神经网络(DNN)的辅助下使用蒙特卡洛树搜索(MCTS)。我们表明,TL 可以将在初始参数分布(环境)上训练所学到的策略转移到新分布所需的策略上,从而加速训练。我们表明,基于 TL 的方法可适应环境的快速或渐进变化。结果表明了所实现的鲁棒性和计算增益。
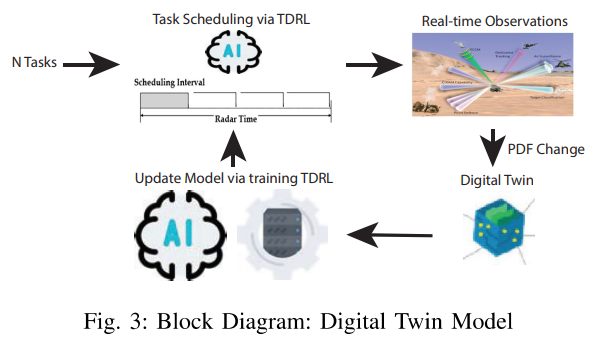
基于迁移的工作面临的一个重要挑战是对环境知识的假设,而在实际场景中,环境知识很可能是未知的。认知雷达的任务调度算法应能适应各种环境,而无需了解环境的基本动态。这就促使我们考虑基于模型的 DRL,即学习环境动态模型,并通过所学模型进行规划来执行任务调度。该方法将 MCTS 与学习的神经网络模型相结合,后者包括一个表示网络、一个动态网络和一个预测网络。这些网络的参数通过梯度下降法更新,在训练过程中使用自我播放机制生成的数据。结果表明,所提出的方法可以在不了解环境动态的情况下,从自我游戏数据中学会自行安排任务,同时提供接近最优的结果。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年10月24日
Arxiv
0+阅读 · 2023年10月23日
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
相关主题
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年10月24日
Arxiv
0+阅读 · 2023年10月23日
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日