
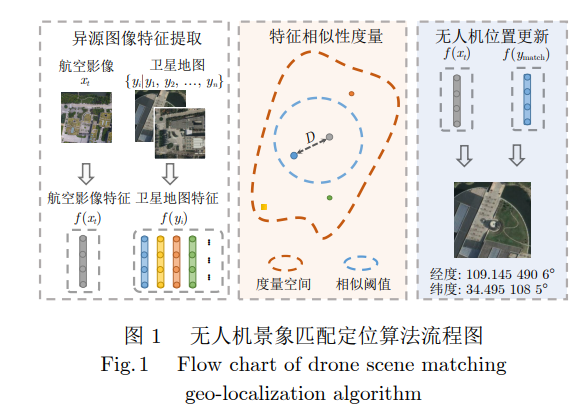
摘 要 无人机因其高度的灵活性, 在临地安防、灾后救援、地质勘测、农业植保等领域发挥着重要作用, 因此受到越来越 多的关注. 定位导航作为无人机中的关键技术, 对于无人机能否顺利执行任务至关重要. 当前主要的定位导航算法包括全球 导航卫星系统、惯性定位以及景象匹配定位导航等. 首先, 景象匹配定位导航方法利用计算机视觉技术, 对无人机飞行时采 集的航空影像进行数字化特征编码; 随后, 通过构建相似性度量与检索模型, 将航空影像特征与预先获取的遥感地图库特征 进行相似性度量, 从而完成景象匹配; 最后, 根据无人机航空影像与遥感卫星地图的匹配结果, 获取相应的地理位置信息, 并将其更新为无人机的定位结果. 景象匹配定位导航方法摆脱了定位系统对定位信号的依赖, 实现了无人机飞行定位的自 主化. 鉴于此, 以景象匹配算法中的特征提取方式为线索, 分别针对基于模板匹配、基于手工特征以及基于度量学习的景象 匹配, 梳理其发展过程, 并总结景象匹配定位导航方法中的关键问题. 最后, 针对景象匹配算法的发展现状, 总结无人机景 象匹配定位方法中亟待解决的问题.
成为VIP会员查看完整内容
相关内容

Arxiv
36+阅读 · 2023年4月19日
Arxiv
194+阅读 · 2023年4月7日
Arxiv
76+阅读 · 2023年4月4日
Arxiv
135+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
36+阅读 · 2023年4月19日
Arxiv
194+阅读 · 2023年4月7日
Arxiv
76+阅读 · 2023年4月4日
Arxiv
135+阅读 · 2023年3月29日