
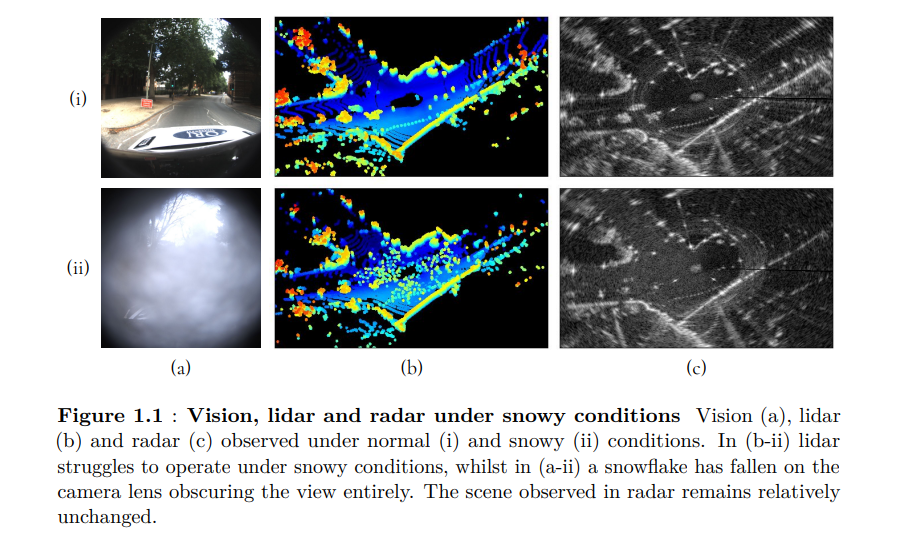
雷达在恶劣条件下以及远程的感测能力使其成为移动机器人应用中视觉和激光雷达的有价值的替代品。然而,雷达复杂、与场景相关的感测过程和显著的噪声缺陷使得使用雷达具有挑战性。超越迄今为止文献中占主导地位的经典基于规则的方法,本论文探讨了在机器人学的一系列任务中深入且数据驱动的解决方案。
首先,开发了一种深度方法,用于将原始传感器测量映射到占用概率的网格地图,其性能显著超越了经典的过滤方法。捕捉到占用状态的分布,此外还允许识别和管理预测中的不确定性。该方法完全使用从激光雷达自动生成的部分标签进行训练,无需手动标记。
接下来,提出了一个深度模型,用于从模拟的高程图生成随机雷达测量值。该模型通过学习前向和后向过程来进行训练,结合使用对抗性和周期性一致性约束与部分对齐损失,使用激光雷达生成的标签。通过忠实地复制雷达的感测过程,可以使用在模拟中容易获得的标签,为下游任务训练新模型。在这种情况下,模拟雷达测量值上训练的分割模型在真实世界中部署时,其性能接近完全在真实世界测量值上训练的模型。
最后,探讨了应用于雷达测距任务的深度方法的潜力。学习的特征空间与经典的相关扫描匹配过程相结合,并针对姿态预测进行优化,使得所提出的方法在性能上显著超越了之前的最新技术。通过概率性的考虑,姿态的不确定性也得到了成功的描述。在此成功的基础上,利用傅里叶变换的性质分离了平移和角度的搜索。结果显示,这种解耦搜索在运行时间性能上有了显著的提升,使得该方法可以在CPU和嵌入式设备上实时运行,同时仍与文献中提出的其他雷达测距方法保持竞争力。

相关内容

牛津大学是一所英国研究型大学,也是罗素大学集团、英国“G5超级精英大学”,欧洲顶尖大学科英布拉集团、欧洲研究型大学联盟的核心成员。牛津大学培养了众多社会名人,包括了27位英国首相、60位诺贝尔奖得主以及数十位世界各国的皇室成员和政治领袖。2016年9月,泰晤士高等教育发布了2016-2017年度世界大学排名,其中牛津大学排名第一。



