
美国海军研究生院(NPS)机器人和无人系统教育与研究联盟(CRUSER)的多线程实验(MTX)计划包含多个研究目标,其总体目标是开发通用的 UxV 网络化控制系统(NCS)。本报告包括过去四年的工作。首先是2017年11月1日至17日在加利福尼亚州圣克莱门特岛进行的初步概念演示,使用(4)无人机(UAV)、(2)无人水面航行器(USV)和(2)无人水下航行器(UUV)支持海军特种作战(NSW)直接行动任务场景,由COMTHIRDFLT舰提供指挥和控制以及模拟随时可用的分布式火力支援。报告介绍了结果以及为实现美国防部任务目标而部署 UxV NCS 的潜在挑战和未来挑战。
引言
移动式无人系统具有无与伦比的收集信息和抵消战场上数量劣势的能力,同时还能降低人员风险。这些优势在阿塞拜疆和亚美尼亚最近的纳戈尔诺-卡拉巴赫战争中表现得淋漓尽致。阿塞拜疆兵力在之前的战争中输给了亚美尼亚,他们能够利用无人机系统通过精确射击迅速建立空中优势,从而实现地面机动。这些行动的规模和速度可能预示着顶尖对手的未来战略。
美国海军司令部的《2021 年海军计划》[1] 承认了这一现实,并将对无人系统的依赖作为海军力量投送的基本组成部分......
"无人平台在我们未来的舰队中发挥着至关重要的作用。成功整合海下、海上和空中的无人平台,将为我们的指挥官提供更好的选择,以便在有争议的空间作战并取得胜利。它们将扩大我们在情报、监视和侦察方面的优势,增加我们导弹库的深度,并为我们的分布式兵力提供额外的补给手段。此外,向小型平台发展可提高我们的攻击力,同时也为海军的发展提供了经济实惠的解决方案。通过分析、模拟、原型设计和演示,我们将系统地部署和运行具有耐久性和复原力的系统,使其能够在不经常与人互动的情况下运行。到本十年末,我们的水兵必须具备在海上与经过验证的无人平台一起操作的高度信心和技能"。
在这一新的现实情况下,由无人驾驶系统组成的网络化协作团队可以通过共享信息和责任来进一步提高任务效率,从而改进作战知识、速度和精确度。从 2017 年开始,我们在海军研究生院(NPS)的工作重点是研究和实验无人机、水面、地面和海底平台的协作配对--UxV 网络化控制系统。
根据海军最近发布的 "UNMANNED "活动计划[2],由 NPS CRUSER 资助的 "多线程实验(MTX)"计划旨在开发一个初步的移动式 UxV 网络化控制系统(NCS)。NCS 是一个由移动代理(有人和无人系统)组成的分布式系统,通过无线网络交换传感、制导、导航、控制和通信信息,以支持任务目标。从系统控制的角度来看,由于引入了时变延迟、不完善的信息交换和信息丢失,增加了无线网络的复杂性。
无人系统的异质组合包括不同的通信、传感和导航模式。这增加了非接触式控制系统的多样性和鲁棒性。通信可通过多种方式传输,包括声学、无线电和光学设备。每种模式都具有影响整体网络性能的性能特征。另外需要考虑的是代理的定位,以优化这些通信链路;这包括在领域之间提供中继的代理(例如,USV 可以充当声学和射频传输路径之间的移动通信网关浮标)。
传感设备通常针对其运行的物理环境。非接触式传感器可能包括声纳、雷达、激光雷达和照相机。它可以产生大量数据。为了避免移动代理之间有限的网络带宽超载,对传感器数据进行处理以过滤掉多余的信息可大大减轻网络负荷。在 UxV 的导航和控制方面,每辆 UxV 都有不同的特点,包括在站时间、机动性、速度、可探测性和覆盖率。这些车辆可以协同工作,以取得更好的效果,其中包括定位和多传感器检测与分类。
总体而言,移动式 UxV NCS 支持传统的军事任务领域,其中包括:协同搜索、协同覆盖、分布式火力、混合控制和编队控制,但该方法的核心原则是系统多样性可增强鲁棒性,并为更广泛的军事任务提供有用的方法。
与 UxV NCS 相关的一些最关键的一般性研究问题包括以下几个方面:
1.如何控制系统?系统控制的考虑因素包括集中式、分布式还是组合式。另一个考虑因素是人类在系统控制中的作用。可供选择的方案包括 "人在回路"(HITL)和 "人在回路"(HOTL)。"人在回路 "是指系统能够自主行动,但人类可以观察系统,并在需要时进行指挥和控制(C2)。
2.如何优化系统?令人感兴趣的是如何安置无人系统以支持地面行动。例如,在能力(如通信和传感)、任务目标、持续时间、稳健性和灵活性方面进行优化。
3.这些系统有哪些特性和弱点?弱点的一个例子可能是敌对兵力摸清任务目标或部队演习的能力。
4.自主性在系统开发中的作用是什么?在可预见的未来,军用 UxV NCS 将需要人类决策。鉴于将有一个人工智能/机器学习(AI/ML)系统自治组件来定位无人系统,一个重要的问题将是设计控制自治和人类决策者之间的接口,以允许透明度、灵活性和控制。
系统结构
图 (1.1) 显示了系统结构。它强调模块化方法,类似于开放系统互连(OSI)模型[3]。它由以下几层组成:
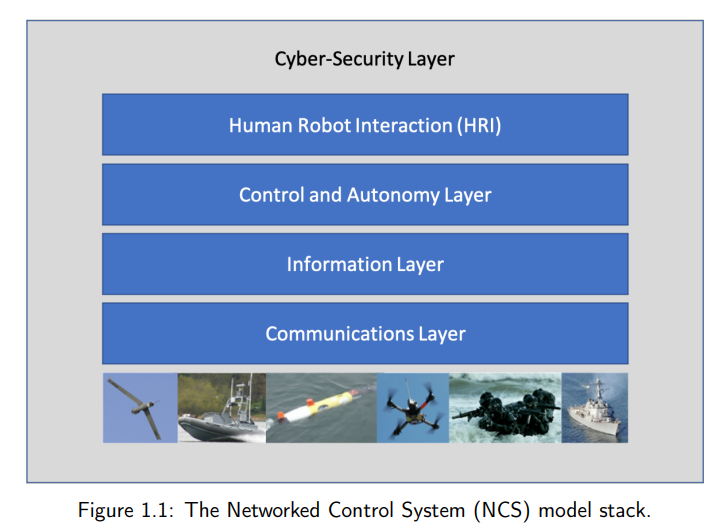
1.第 1 层:移动代理--组成网络的有人和无人系统。每个节点都有与其能力相关的独特参数。这包括但不限于节点的移动性、能量、速度、传感、通信和计算处理能力。
2.第 2 层:通信--通信能力对于 NCS 的可控性和可观测性至关重要。它并不局限于单一的通信基础设施(如无线通信),而是可以由多种模式组成。对于 MTX,既有射频通信,也有声学通信。射频网络由 Persistent Systems 公司的网状中继无线电代表。网状中继包括一个路由发现服务软件组件,可自动为代理之间的信息通信确定路由。通信的一个重要组成部分是能够使用与通信介质相关的连接指标,以确保系统的可控性。例如,通过应用程序接口,可以测量无线电之间的信道统计数据,如信噪比(SNR)。这可用于优化网络内的系统定位,确保控制和感知数据能通过网络可靠传输。
3.第 3 层:信息--信息层是一个抽象层,代表通过网络传输的协议和内容。信息层包括 UxV 状态、传感器数据和互连数据。状态数据提供了代理的位置、方向(及其导数)和物质条件。互联数据(来自通信应用程序接口)用于控制和导航。它是网络中本地可行的路径。这为确定适当的控制策略提供了必要的输入,以完成在节点之间创建稳健的通信路径等任务。信息层支持与 AI/ML 方法相关的自主推理,特别是在多传感器融合方面。
4.第 4 层:控制与导航--这是系统在通信、传感、能源、时间和车辆动态等限制条件下实现任务目标的能力。系统控制可以是集中式和/或分布式的。集中式和分布式控制能力可能会增加处理多种任务场景的灵活性。它包括所有系统节点的轨迹或路径规划,包括对载人系统的建议。
5.第 5 层:人类/机器人接口(HRI)--HRI 包括人类控制系统的潜力和 NCS 向用户提供及时信息的能力。设计的一个重点是能够以较少的人员控制更多的代理。
6.第 6 层:赛博安全--保护所有层的是一个赛博安全模型。这包括应用安全、信息安全、网络安全、算法安全、灾难恢复和最终用户合规性。
技术三要素
机器人技术、互联网-网络和人工智能/移动语言三位一体的技术(图 1.2)推动了更高水平的自主性。每项技术都会对上述所有系统架构层产生影响。对于 UxV NCS 而言,机器人技术的关键问题包括 1). 实现后勤和维护自动化,以便快速部署和恢复多个无人系统。2). 减少操作和维护无人系统所需的兵力。提高 "齿-尾 "比,通过提高作战灵活性和降低兵力保护要求来提高任务效率。
AI/ML 的突出问题围绕信任展开。这些问题包括:透明度/可解释性、伦理考虑、系统可控性、稳健性和可靠性 [4],[5]。互联网络的问题包括:开发通用灵活的通信模型,以支持系统效用最大化;开发用于动态数据包路由规划的网状无线电算法;开发面向服务的架构,以根据数据包的重要性确定网络流的优先级。
三要素的核心是计算。它强调了计算对系统性能的影响。无人平台的类型会影响机载可用计算量。较小的无人飞行器和无人潜航器的机载计算量往往有限,而 USV 和 UGV 在安装额外计算机方面可能更具灵活性。在设计和使用系统时,可能需要明确考虑相应的卸载处理和定位代理。
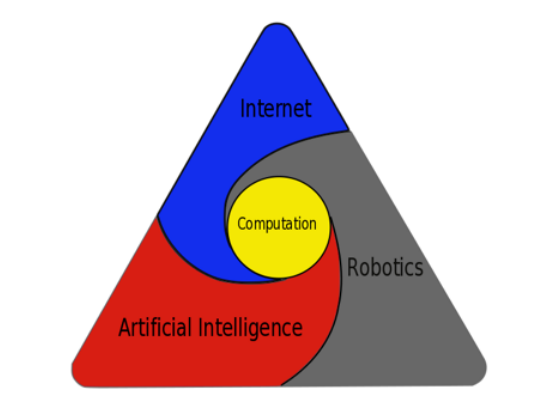
图 1.2:技术三要素--机器人技术、互联网技术和人工智能/移动通信技术影响着非接触式传感器模型堆栈的各个层面,同时也凸显出非接触式传感器的设计和信息流受到每个平台上可用计算能力的重大影响。
无人系统概述
MTX 的无人驾驶系统几乎全部由 NPS 自主车辆研究中心 (CAVR) 提供。所有系统都具有 WiFi 功能,UUV 是唯一没有 Persistent Systems 网状中继无线电的航行器。它们在海底使用声学调制解调器传递信息。NCS 无人系统包括以下设备:
1.(2) NPS REMUS 无人潜航器--这些 Hydroid 系统是专门的 REMUS 100 无人潜航器,包括以下传感和导航功能: 导航级惯性导航系统(INS)、上下视声学多普勒海流剖面仪(ADCP)、900/1800 KHz 侧扫声纳、Blueview 450 前视声纳和 2.25 GHz 微型测深声纳、WHOI 声学微型调制解调器、GPS 和 WiFi。
2.(2) NPS SeaFox USV--该系统由 Northwind Marine 制造。第一个船体作为移动通信中继浮标,能够将声学调制解调器插入水中,用于收集 UUV 的声学数据并通过 UAV 传播给用户。第二个船体用于插入海豹突击队,并安装有雷达,用于探测水面交通。SeaFoxs 采用喷水发动机,使用 JP-5 燃料,航速超过 40 节。
3.(2) NPS ScanEagles--由 Insitu 公司制造,这些无人机由 NPS 和 NAVSPECWAR 第一特种侦察队共同操作。无人驾驶飞行器经过改装,安装了国家航空航天研究所中国湖制造的电源控制板(PCB)和国家航空航天研究所的二级控制器中央处理器。这样就能够收集状态信息,并通过网状无线电分发数据。
4.(1) Shield AI 四旋翼飞行器--四旋翼飞行器用于在建筑物内搜索,以探测名义上的放射性设备,这是新南威尔士州任务场景的目标。在没有 GPS 的情况下,仅使用照相机和基本的死算算法进行导航的能力被称为 SLAM(同步定位和绘图),对于室内、太空和海底等 GPS 信号衰减或被拒绝的环境至关重要。
所有 NPS UxV 系统的一个关键设计考虑因素是采用二级控制器架构。所有 NPS 系统都是军用级系统。这些系统现在或过去一直是军事库存中的作战兵力。二级控制器是一台已安装的计算机,通过通信应用程序员接口(API),可以发送控制无人系统的超控命令,并接收主控制器发送的状态信息。一般来说,这允许将较高层次的自主性(如路线规划)与低层次的指令(如控制系统执行器沿路径运行)分离开来。这种方法假定制造商提供 "底层 "控制和通信 API。这可以大大加快开发过程,无论无人系统制造商是谁,都可将其视为扩展多代理系统不可或缺的组成部分。这种方法的一个例子是 Hydroid REMUS RECON 或远程控制协议 (RCP) API。
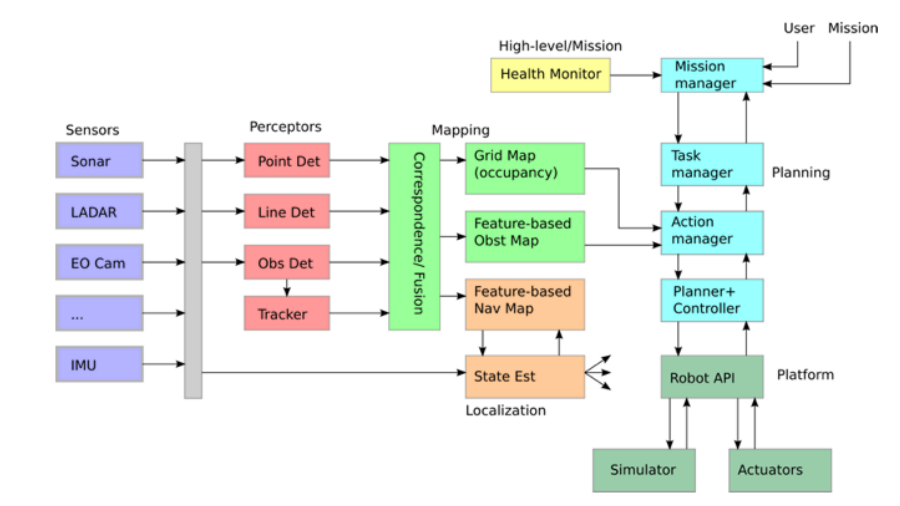
图1.3:CAVR ROS架构
图 (1.3) 显示了 CAVR 二级控制器架构的整体软件架构。它使用 Linux 操作系统(Ubuntu 18.04)和机器人操作系统(ROS)Melodic Morenia 作为软件中间件。每个方框代表一个 ROS 节点。信息从左到右流动。方框的颜色反映了 ROS 节点的功能。从各种传感器(紫色)收集数据。感知器处理传感器数据(粉色),并将这些信息输入映射组件(绿色)。这些信息将作为路径规划和状态估计(橙色)的输入。
还有用于管理飞行器导航的流程(浅蓝色)。其中包括任务管理器、任务管理器、规划器和控制器。此外,还有一个健康监测器(浅黄色)。最后还有一些流程,包括主控制器发送和接收信息,以及模拟和执行器(深绿色)。
其余文件详细描述了与 MTX 相关的研究和实验。其中包括圣克莱门特岛(SCI)演示,但也包括在加利福尼亚州尤马试验场(YPG)和罗伯茨营使用 NPS ScanEagle 进行的测试、在加利福尼亚州蒙特雷湾进行的 UUV 和 USV 测试,以及与整个 NCS 系统方法相关的最新进展。实验 "主线 "包括 用于 NCS 优化的高级自主性、UxV 通信优化、支持道路网络拦截的最佳无人机轨迹、移动网状网络性能和分析、使用适应领域的卷积神经网络进行道路网络的跨领域识别,以及自动创建标签点云数据集以支持基于机器学习的感知。

