
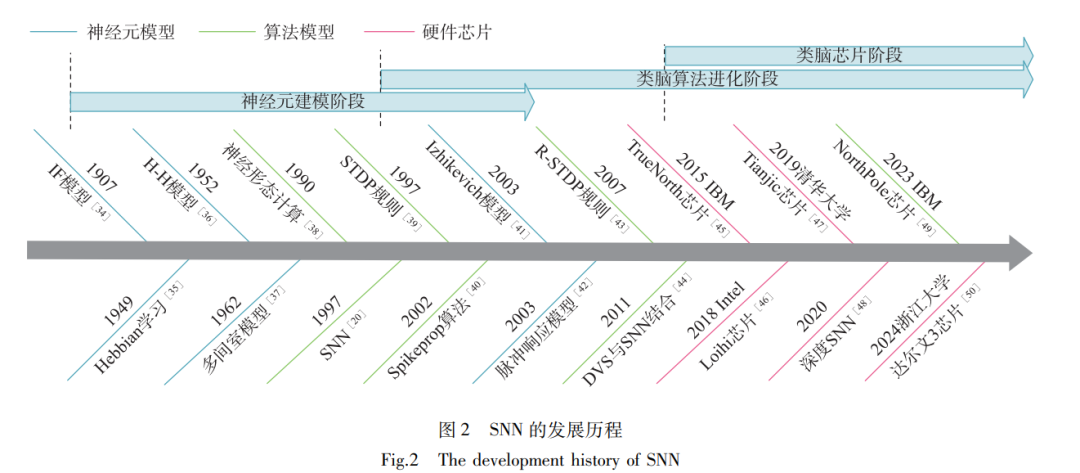
像人一样在复杂多变的非结构化环境中灵巧操作是机器人研究追求 的目标之一 。受生物脑工作方式启发的脉冲神经网络(SNN)是类脑智能 领域的主要工作范式,具有良好的生物合理性,在机器人智能控制领域 日益受到关注。本文对基于 SNN的机器人类脑智能控制相关研究展开 综述,期望能为机器人和类脑智能领域的研究带来启发。首先,介绍 SNN的发展历程、神经元模型、编码方式、突触可塑性和网络结构等相 关知识。其次,借鉴人类的运动反馈控制机制,给出一种基于 SNN的机 器人类脑智能控制框架。再次,从运动控制、柔顺控制、协同控制三个 方面介绍机器人类脑智能控制策略的研究进展。最后,对基于 SNN的 机器人类脑智能控制技术进行了总结与展望。
成为VIP会员查看完整内容
相关内容
Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
152+阅读 · 2023年3月29日