

引言和目标:
弹药应对任务,如远程勘测、回收和拆除潜在危险的未爆弹药,需要穿越两栖地形。冲浪区(海洋中的浅水区)是一个特别关键的区域。在这些区域清除未爆弹药可能是防止其进入陆地的优先事项。移动机器人有可能使这些任务更安全、更高效。然而,在冲浪区进行两栖运动具有挑战性。体重大的机器人会在沙中下沉,体重小的机器人则会受到海浪的干扰,这些都限制了机器人的设计空间。
本项目的主要目标是确定类蟹腿能在多大程度上增加机器人移位所需的力量,从而有效增加重量。这就需要开发带有类蟹腿的两栖机器人平台和实验室波浪槽测试装置。除了鉴定静态抓取行为外,还必须验证抓取腿也能在受控实验室基底和当地海滩的自然地形上行走。我们还展示了初步的传感器集成。在未来的工作中,我们可以在支腿设计的基础上确定最简单有效的支腿,并创建一个更先进的平台,以比较轮式机器人在冲浪区地形中的通行能力。
技术方法:
受生物螃蟹的启发,制造并改装了有腿机器人(质量从 1 千克到 4 千克不等)。在受控实验室测试中,我们比较了尖头、类似螃蟹的双足和传统的圆形机器人脚,并比较了从站立位置向内移动双腿抓地的效果。我们使用数字测力计和恒速绞盘测量了最大垂直抓地力。通过视觉跟踪,我们测量了液压活塞产生的波浪导致的位移。我们在户外淡水湖波浪中对机器人进行了验证。
结果:
研究表明,通过使用弯曲的尖锐触角并向内拉动脚部,机器人在潮湿的水下沙地中的有效重量可增加三分之一。锋利的双足可以避免机器人因波浪而移位数厘米,并减少因较大波浪而造成的移动。双足可以在岩石和沙地上持续行走,但速度比原来的圆形脚要低(可能是由于在坚硬表面上打滑和在沙地上下沉)。在户外测试中,演示了在海浪中行走,海浪冲过身体,以及在大约 1 米深的水下行走。还展示了可以将传感器集成到脚上,以收集地面接触数据,从而对负载分布做出一致的响应。
优势
这项工作为未来减轻重量的两栖腿部机器人拓展了设计空间。预计这将有助于两栖机器人更好地在海浪中航行、处理更多的有效载荷以及从空中飞行器上进行部署。选择性抓地还能实现机器人利用波浪力的超高效步态。这种机器人的应用可能包括沿水线采集样本、进入有危险材料的地点,以及可能使用额外的腿来移动单个未爆弹药或使其失效。
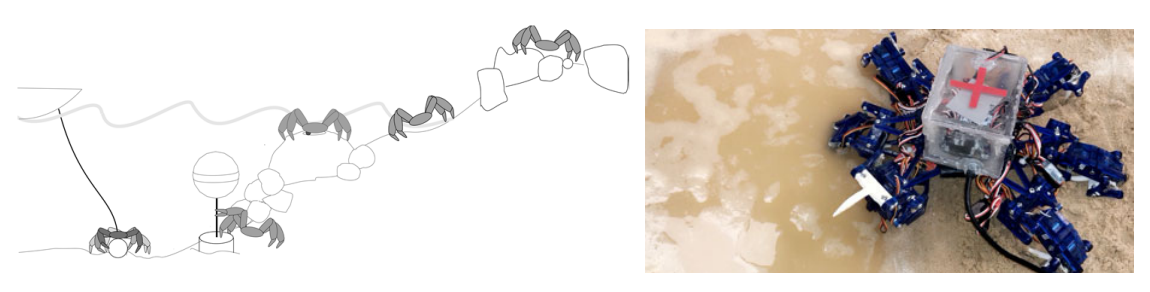
图:用于冲浪区的类蟹机器人概念(左)和两栖测试中带有尖头双触角的螃蟹机器人平台(右)。
