
自主与安全平衡是无人机技术与产业健康、快速发展的战略需求和核心关键. 在同时面对“不 断提升的无人自主飞行性能”与“日趋严峻的物理、信息、智能等多域安全威胁”的挑战下, 仅借鉴有 人机安全体系, 适度拓展适航飞行和感知规避为核心的安全架构已不能满足现在和未来无人机系统 的安全需求, 构建无人机自主安全新架构显得十分必要和迫切. 本文从自主性这一无人机固有的本质 属性出发, 初步研究了无人机自主安全架构, 重点定义和表征了“无人机自主安全”新概念、构建了面 向多域安全威胁和系统高度自主的无人机系统自主安全新模型、提出了无人机系统自主安全能力分 级. 为我国军民用无人机行业健康快速发展提供基础支撑, 为其他无人系统安全体系建立提供借鉴。
1. 引言
近年来, 无人系统技术, 特别是无人机系统 (Unmanned Aerial System, UAS) 技术发展迅猛, 系 统类型多样, 涵盖领域广泛, 应用数量巨大. 其显著特征是无人机与环境、人的关系更加复杂多样, 无 人机安全性面临的新挑战日益突出, 主要体现在:1) 复杂的飞行场景: 如临近空间、传统空域、山 地、城市、丛林、极低高度, 甚至是与人相伴的室内外场景; 如全天候、全天时、长周期、密集频 繁的飞行任务; 如越来越多以编队、集群等合作方式工作等等. 飞行器与环境、人深度耦合, 飞行 器之间, 飞行器与环境、人之间的交互更加密切. 2) 多域的安全威胁: 飞行器的安全从适航安全 (传 统飞行安全) 拓展到信息安全、智能安全等多个领域, 飞行器不仅仅需要考虑对物理障碍 (山、树、 塔、楼、其它飞行器等) 的感知与规避技术 (Sense and Aviod, SAA)[1], 更需要考虑电磁空间、赛博 空间、智能算法空间带来的新安全威胁, 需要考虑保护-检测-响应 (Protection-Detection-Response, PDR)[2]、策略-保护检测-响应模型 (Policy-Protection-Detection-Response, PPDR)[3]、防护-检 测-响应-恢复 (Protection-Detection-Response-Recovery, PDRR)[4,5] 等信息安全模型在无人机系 统安全中的表述. 3) 变化的人/机角色: 飞行器在感知-判断-决策-行动 (Observation-OrientationDecision-Action, OODA)[6] 环路中被赋予了极大的独立于人的自主性, 人与机的关系发生了深刻变 化. 考虑飞行场景和多域安全的现实状况, 从机的角度看, 飞行器飞行的自主能力提升几乎没有上界;而从人的角度看, 安全保障却没有得到足够的重视与关切. 由此可见, 当前和未来的飞行器, 已不再 是 “高高在上, 不‘视’人间烟火的空中机器人”, 而是可以随时出现在我们身边, 向纵深发展的必然 趋势是智能赋能与多域协同. 智能赋能是更广泛的采用人工智能技术不断提升无人系统的自主性, 多 域协同则是高效整合和利用 “陆、海、空、天、电、网” 资源, 实现诸如 “马赛克战”、“多域战” 等 新战法, 取得非对称优势, 应对大国竞争。近年来, 围绕无人系统 (Unmanned System, UMS) 的感知、规划决策、控制涌现了大量技术成 果和验证系统, 但在无人机系统自主性、智能化水平不断提升的同时, 针对环境、任务的变化, UMS 安全性不但没有在自主框架下给予拓展定义和能力提升, 反而涌现了新的系统性风险和脆弱问题. 在 物理安全方面以适航安全框架为主, 其核心 SAA 技术得到长足发展, 包括相关政策法规制定、理 论技术研究和试验平台研制. 2018 年北约第一次发布了针对无人机感知与规避的标准化操作文件 STANREC 4811, 对无人机感知与规避提出标准化的配置要求和操作指南. 美国更是在 SAA 体系、 政策、技术和装备等方面取得了一系列进展. 在信息安全方面, 对有人机而言, 其对信息技术的依赖 程度从提升飞机性能与运行效率起步, 逐步进入飞行器系统核心, 但是角色仍然是 “锦上添花”. 对于 无人机而言, 其对信息技术的依赖, 从其诞生开始就是 “生存” 的根本保障. 2017 年发布的最新版美 国无人系统路线图中, 网络安全被定义为无人系统未来技术研究的四个核心主题之一. 2019 年美国 司法部发布无人机修正法案, 要求进行网络安全评估. 新一代人工智能技术极大推动了智能无人系 统发展, 其中最具代表性的无人机正快速从大中型/中高空向中小型/中低空应用拓展, 由简单开阔环 境向城市/山地/丛林的复杂环境延申, 无人机与人、环境的交互耦合更深更密, 进入的作战空间、时 间和领域更加丰富多样. 当前, 大部分人工智能相关模型均缺乏可解释性, 且绝大部分人工智能核心 处理模组、开发平台均掌握在少数西方发达国家手中, 自主可控性差. 当面临真实战场环境的各种恶 意攻击, 甚至经济外交打压时, 按照目前的发展模式, 新一代人工智能的实战效果将大打折扣. 未来 作战对抗模式将发生巨大变化, 由原来信息域对抗演变为以认知域为主的对抗, 以深度学习为主要算 法的智能识别系统愈发容易受到欺骗攻击, 智能识别模型更显脆弱. 2018 年欧盟委员会提出鲁棒及 可解释的人工智能专项, 旨在提升智能技术的透明性、可靠性及数据安全性, 更多国内外学者从可解 释性和鲁棒性等方向开始考虑智能算法的安全性问题. 2019 年美海军研究局发展“新型数字伪装欺 骗技术”, 该技术可迷惑敌方的智能侦察与打击系统, 将坦克识别为轿车. 2019 年美国 DAPAR 提出 “确保人工智能抵御欺骗稳健性”(CARD)项目, 开发新一代对机器学习模型的欺骗防御技术, 主 要体现在防御性机器学习理论、构建防御系统、搭建测试平台等. 空天基平台(卫星、无人机)对 机场、阵地、航母等高价值目标的光电识别时, 目标成像分变率低(目标成像少像素特性), 仅需少 量像素扰动就能欺骗智能识别模型, 导致识别任务失败.上述研究为无人机系统应对新安全挑战提供了可借鉴的理论和技术成果, 但由于各项研究相对 独立, 难以真正有效解决无人机系统面临的“不断提升的无人自主飞行性能” 与 “日趋严峻的多域安 全威胁”所带来的挑战. 无人机在复杂任务达成和环境交互过程中, 面临的物理、信息、智能域的威 胁是交互渗透的, 并非简单叠加. 特别是在国防军工和特殊应用场景中, 在资源受限、电磁拒止等约 束下, 解决当前无人机系统在物理、信息和智能等领域的安全威胁, 简单的序贯处理, 或者功能叠加 更是无法有效应对多域并发协同威胁. 而有效应对这些威胁的核心困难源于无人机系统不断提升的 自主性, 可谓“自主必须安全, 安全需要自主”相互交错. 本文在阐述无人机安全性与自主性研究进展 的基础上, 研究和建立面向物理、信息、智能算法等多域安全威胁的无人机系统自主安全体系架构:概念、表征模型、能力模型与自主安全能力分级, 简述了构建完善的无人机自主安全理论框架和技 术体系所面临的挑战.
2 无人机系统自主与安全研究进展
本节将详细介绍当前关于无人机自主性、无人机物理安全、无人机信息安全、以及无人机智能 安全的相关研究现状和发展动态.
2.1 无人机系统自主性
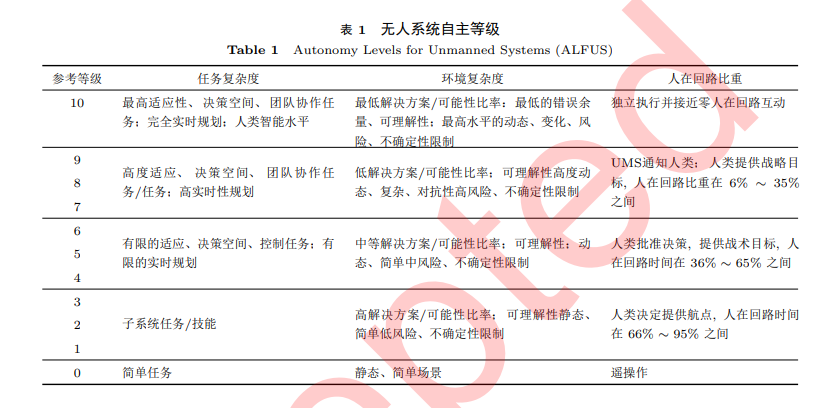
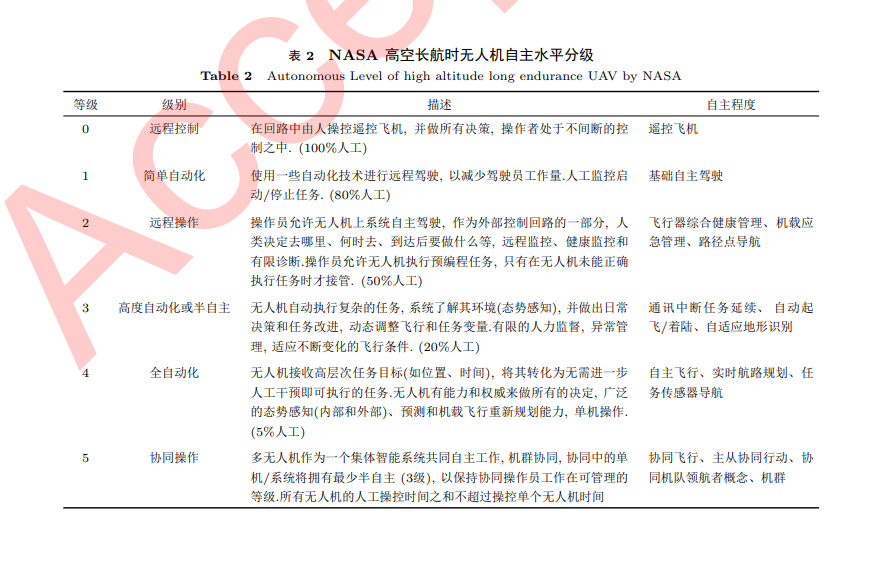
在无人系统的研究过程中, 人们发现它之所以能够在无操作者参与环境下工作, 其中一个非常关 键的因素就是它能够进行自我管理, 即具有一定自主能力. 无人机作为一类典型的无人系统, 其在飞 行控制、感知规避、攻防博弈、智能协同等方面的自主性更是受到长期关注和日益重视. 在无人机自主性研究方面, 美国联邦航空管理局 (Federal Aviation Administration, FAA)、国 际民航组织 (International Civil Aviation Organization, ICAO)、欧洲航空安全局 (European Aviation Safety Agency, EASA), 包括美国国家标准与技术研究院 (National Institute of Standards and Technology, NIST)、美国陆军无人系统路线图研究小组、美国靶场指挥官委员会、美国宇航局 (National Aeronautics and Space Administration, NASA)、美国国防部 (United States Department of Defense, DoD)、英国国防部 (Ministry of Defence, MoD) 等组织和机构长期致力于无人系统 (Unmanned System, UMS) 自主能力研究, 将自主性放在无人系统研究的首位[7], 认为自主性是无人系 统固有的、本质的属性 [8-10], 是有人系统所不具备的标志性特征. 其中, NIST 给出了被公认是较为 全面规范的定义[9]: “自主性是指无人系统拥有感知、观察、分析、交流、计划、制定决策和行动的 能力, 并完成人类通过人机交互布置给它的任务. 自主性可根据任务的复杂性、环境的困难性, 以及 为完成任务进行的人-机交互程度等因素来区分等级, 进而表示出无人系统自我管理的状态和质量.” 无人系统的自主性量化评估对于无人系统的研制和设计、无人系统研究政策制定以及无人系统 用户都有非常重要的意义. 无人系统自主性量化评估规避了无人系统在自主性能描述上的模糊性, 有 利于提高工程科学性和可操作性. 无人系统自主性评价方法主要有以下几种: 等级法、双坐标轴法、 三坐标轴法[2]、查表法和公式法[3]等. 其中, 三坐标轴法因其综合考虑决定系统自主性的各个因素 而成为主流评价方法, 比较有代表性的是 NIST 智能系统部门 Huang 等人[2]提出无人系统自主等 级 (Autonomy Levels for Unmanned Systems, ALFUS). ALFUS 从任务复杂度、环境复杂度、人在 回路比重三个维度给出自主的 10 级定义, 对无人系统自身的综合感知、认知、分析、交流、规划、 决策和行动/执行等能力进行了描述, 如表 1 所示. NASA 则给出了高空长航时无人机的自主性定 义[10]:“可以视为驾驶员虽不完全脱离无人机回路, 但最大限度地减少人员参与无人机操作, 同时保 证无人机遂行任务的灵活性和无人机的稳定性”, 对应自主水平分级如表 2 所示. 无人系统自主性 研究目前也成为国内关注的热点问题, 比如王越超等人采用的蛛网模型对 ALFUS 工作组三因素自 主评价模型的扩展. 自从 2008 年以后, AFLUS 逐步减少, 之前对于 AFLUS 的研究都是自主优先, 安全往往成为默认满足的前提条件. 但是对于无人机的自主飞行问题而言, 自主和安全应是两个紧密 联系的概念, 必须将两者结合起来, 对已有自主等级模型施加一定的安全约束, 从而实现安全自主.
2.2 无人机系统物理安全
无人机系统物理安全的感知与规避是指无人机系统通过传感器和数据链路实现对空中交通环境 和各类障碍物的有效检测和评估, 预测可能的碰撞威胁, 生成有效规避路径, 并进行应急机动, 从而实 现碰撞规避的技术. FAA民用无人机路线图定义:“SAA 为无人机提供自分离和碰撞规避功能, 保障 与有人机 see and avoid 操作类似的等价安全飞行”(SAA capability must provide for self-separation and ultimately for collision avoidance protection between UAS and other aircraft analogous to the “see and avoid” operation of manned aircraft that meets an acceptable level of safety). 感知与规 避系统的关键技术包括:实现空间环境感知, 利用各种传感器对空间环境和各类障碍物进行检测, 获 取可能存在碰撞威胁的动态或静态目标的检测环节;通过有效的估计、跟踪算法实现飞行空间目标 的飞行状态估计, 位置、速度的跟踪环节;根据目标的运动状态和空间分离规则对碰撞进行威胁程 度的计算;对存在多个碰撞威胁目标时, 对目标进行基于威胁程度的等级划分和先后排序等威胁评 估等环节;根据威胁评估结果判定给出飞行管理决策, 根据最小分离点 (Closest Point of Approach, CPA)、碰撞时间 (Time To Collision, TTC) 等计算规避路径等规避决策与路径规划环节;通过机 动输出, 执行规避决策和规避路径跟踪的规避机动环节等.
在面向物理安全的感知规避技术发展中, 规避是重要的响应阶段[11], 目前发展了大量感知规避 相关方法, 主要包括基于数学规划的方法、基于路标图的方法、基于空间搜索方法、遗传算法等[12]. 传统的动态规划法是应用较为广泛的一种方法, 通过将规划问题等效为多级决策问题. 例如, 为克服 混合整数线性规划 (Mixed Integer Linear Programming, MILP) 方法计算量大的缺陷, 文献[13]提出 基于有限视场的动态MILP路径规划算法. 而Turnbull O等[14]则将MILP与模型预测控制法 (Model Predictive Control, MPC) 相结合, 辅助训练语言决策树 (Linguistic Decision Trees, LDTs) 以提升在 线航路规划的实时性. 针对城市环境下无人机自适应目标跟踪与避障问题, Wu J 等[15] 首先利用分 布式模型预测控制 (Distributed Model Predictive Control, DMPC) 方法进行优化建模, 其次利用自 适应蝗虫优化算法 (Adaptive Grasshopper Optimization Algorithm, AGOA) 在线优化求解最优控 制器. 文献[16]提出通过利用滚动时域控制法 (Receding Horizon Control, RHC) 优化人工势场中的 附加控制力来实现无人机的在线避障. 针对未知情况下的航路规划问题, 文献[17, 18]采用动态规划 策略确保飞机实时规划未来路径, 通过引入基于马尔科夫的生存模型实时评估飞机的生存状态概率. 基于路标图的方法主要包括可视图法 (Visibility Graph)[19]和Voronoi图法[20]等. 为提高Voronoi图 在突发威胁下无人机动态航迹规划方面的实用性, 文献[21]首先通过引入威胁源的不可穿越区域边界 提出一种改进型的Voronoi图构造模型, 提高了航迹段对威胁的敏感性, 其次在分析突发威胁对于航 迹拓扑空间影响的基础上, 提出了一种基于改进型Voronoi图的航迹重规划模型, 结合D算法对突发 情况下的航迹重规划进行了研究, 进而规划出理想航迹. 基于空间搜索方法是另一个重要的碰撞规 避方式, 常见的搜索方法包括A算法[22]、D*算法[21]以及快速搜索随机树算法 (Rapidly-exploring Random Tree, RRT) 等. 其中, RRT算法是一种采用增量方式增长的随机采样算法, 用于解决有 代数约束 (障碍带来的) 和微分约束 (非完整性和动态环境带来的) 的高维空间问题. 其优势在于无 需对系统进行建模, 无需对搜索区域进行几何划分, 覆盖率高, 搜索范围广, 可以尽可能的探索未知 区域, 但同时也存在算法计算代价过大的问题. 为解决此问题, 研究者们提出RRT的各种改进形式. 如Lin等[23]通过 Close-Loop RRT, 将闭环路机动控制与 RRT 路径搜索相结合, 通过闭环机动控制飞行轨迹预测实现更小的预测误差和碰撞风险, 路径规划考虑目标机动约束。
随着强化学习的发展, 很多学者将其成功的运用在了无人机的感知与规避过程中, La 等[24]提 出了一种基于强化学习的障碍物/捕食者规避方法, 通过将高层的 Q-learning 决策过程与低级的无 人机集群控制结合, 实现了对障碍物的有效规避. 在其后续的成果中[25], 完全基于 Q-learning 方法 实现了障碍规避功能, 其中碰撞规避功能被建模为一项激励函数. 在 Long 等[26]基于深度强化学习 方法 (Deep Reinforcement Learning, DRL), 构建深度神经网络模仿基于几何关系的障碍规避方法 ORCA从而实现在多智能体设置下的碰撞规避. 在文献 [27]提出的类似的深度强化学习框架中, 通过 对学习策略和激励函数的改进, 实现了比 ORCA 更好的规避性能. Lyu 等[28]基于集中式的强化学 习框架和分布式的控制策略大大提高了强化学习的效率. 除此之外, 由于Q学习算法的状态空间和动 作空间均为离散的, 因此其规划航路的可飞性较差, 且难以应付动态威胁. 针对此缺陷, 研究者提出 将深度学习和强化学习相结合, 组成深度强化学习算法, 以满足状态空间或动作空间连续化的需求. Yan 等人[29]在路径规划中引入了不同改进型的深度 Q 网络 (Deep-Q Network, DQN)[30], 取得了 较好的效果, 但由于 DQN 的动作空间仍然是离散形式的, 因此规划的路径质量仍有提升空间. 无人机感知系统主要分为合作式感知系统及非合作式感知系统, 常见的合作式感知系统主要由 ADS-B 和 T-CAS 技术作为支撑. 其中 ADS-B 能够获得目标的绝对经纬高度信息, 有效防止有人 机与无人机在空中发生碰撞, 其感知精度取决于目标的导航系统精度[31]. 早期的 ADS-B 收发器的 尺寸和重量限制了它们在机翼上的应用, 潜在的SAA应用主要是在模拟环境中进行研究[32]. 在此之 后, 低功率和低成本的 ADS-B 变异型也为无人机进行了开发[33]. 2018 年, NASA 还在其无人机系 统 (UAS) 交通管理 (UTM) 项目中探索了 ADS-B 在无人机中的使用[34]. 随着 ADS-B 用于低空无 人机的增加, ADS-B 感知技术的局限性也凸显. 最主要的是频率拥塞, 这将影响无人机机队的增长. 从 Guterres 等人[35]的研究中可以看出, ADS-B 是一种不适合未来无人机应用增长的解决方案, 因 为它会造成 ADS-B 共信道干扰的可测量增加, 这可能会对飞机之间的机对机和机对地性能产生负 面影响. 而 T-CAS 系统能够获得高精度的目标的相对距离、相对方位和高度,是一种在有人机上得 到广泛应用的成熟技术[36]. 1981 年 FAA 决定在 BCAS 的基础之上开发和实施 TCAS[37]. 2006 年 MIT 林肯实验室联合 MITRE 公司基于美国空军和 FAA 对全球鹰无人机的感知能力需求完成无人 机机载 T-CAS II 的感知与规避测试[38]. 2007 年美国空军研究实验室研究分析了使用多个传感器 数据驱动一种与配备 TCAS II 的载人飞机兼容的避碰算法的可行性[39]. Lin 等人为解决小型飞机 在低空飞行时的冲突问题, 基于视觉飞行规则 (VFR) 下的自动依赖监视 (ADS) 概念, 提出了一种交 通预警与避障系统 (TCAS) 算法, 为低空飞行提供了更广泛的航空安全[40]. 通过以上分析, 合作式感知方式的前提是本机与空域其他飞行器能够建立基于应答机制或广播 的合作式信息交互通道, 难以保证在真实飞行环境中非合作目标存在情况下的感知与规避, 因此, 单 一的合作式感知与规避技术难以真正保证无人机的空域飞行安全. 为了应对以上问题, 诸多研究者 将目光转向非合作式是感知. 在非合作环境感知过程中, 无人机搭载的常用非合作目标感知设备包 括雷达、激光雷达、超声波等主动感知设备以及光电、红外等被动感知设备. Accardo[41] 描述了 一种基于雷达的 SAA 系统, 通过 Kalman 滤波方法实现对目标飞行器的状态估计, 并通过有人机 的飞行测试证明了其算法的有效性. Owen 等[42]设计了一种适用于大、中型无人机感知与规避任 务的雷达系统, 并通过提取信号特征和误差精度分析验证了该雷达的空域目标感知能力. Newmeyer 等[43]设计了一种适用于小型无人机的毫米波雷达空域感知系统, 通过一系列的信号处理方法获得目标的距离和方位角度后, 用 RANSAC 方法实现对目标的跟踪. 在检测中通常使用单静态脉冲调制雷 达有时也会用到连续波(CW)技术[44, 45]. 针对大中型无人机系统, 美国率先启动了地基感知与规避系统的研究,并在 2014 年前完成了地 基感知与规避系统的验证与列装[46]. 2018年 Sahawneh 等人[47]提出了一个完整的、概念证明的小 型无人驾驶飞机系统的感知和回避解决方案, 包括一个小型低成本的地面雷达系统、多目标跟踪和 估计、碰撞检测和回避计划. 2019 年 Meer 等人[48]研究了无人机通过蜂窝技术将其位置信息传输 到云, 而 GBSAA 基站通过 ADS-B 技术访问聚合信息并将其发送到启用 ADS-B 的飞行器. 并进 行了分析和仿真研究, 研究了不同网络参数(如无人机数量和 ADS-B 启用飞行器)下 ADS-B 信息碰 撞概率. Fasano 等人[49]研究了一种基于雷达/光电数据融合的多传感器障碍物检测与跟踪系统的硬 件/软件实现和飞行结果. Chen 等人[50]研究了一种新的基于主动感知的飞行机器人在动态环境中的 避障模式. 他们没有融合多个传感器来扩大视场 (FOV), 而是引入了一种替代方法, 利用具有独立旋 转自由度的立体摄像机来主动感知障碍物. 针对小微型无人机, Alvarez 等[51] 提出了一种基于单目视觉的四旋翼无人机感知与规避系统, 通过融合单目传感器感知信息和自身运动测量基于机载实时处理系统构建地图的方式, 实现在室内 场景中反应式的碰撞规避. Lyu 等[52]设计了一种单目视觉感知与规避系统, 包括单目相机以及机载 处理系统, 不依赖深度信息, 仅基于角度感知信息实现了小型无人机对空中目标的有效障碍规避. 为 解决单目相机在深度估计方面的不足, 基于双目相机[53]、深度相机 [54]、激光雷达[55] 等感知方法 和系统得到广泛的研究. Gageik 等[56]提出一种低成本多传感器障碍规避系统, 通过搭载红外、视 觉、激光等多种类型传感器和机载处理系统, 能实现在复杂火灾场景中的搜救任务并保证障碍规避.
**2.3 无人机系统信息安全 **
随着电子信息与无人驾驶技术的迅猛发展, 无人机在军用、民用、工业及消费等领域的应用规 模不断扩展, 其信息安全问题得到了越来越广泛的关注. 早在2011年, 伊朗军方就曾通过GPS欺骗技 术成功捕获了一架美国 RQ-170 无人机[57], 同年, 一种名为 “keylogger”[58]的病毒被传播至美国内 华达州空军基地中, 窃取了大量无人机的遥测与实时侦察情报数据. 这些案例迫使美国政府与军方 开始高度重视无人机信息安全. 2019年, 美国司法部发布无人机修正法案, 要求对无人机系统进行网 络安全评估. 同年, 由美国航空院校、企业与军方专家联合编写的无人机信息安全专著《Unmanned Aerial System in the Cyber Domain》发布, 从工业控制系统的角度切入, 对信息对抗反无人机技术 与无人机的信息安全防护技术做了全面的分析与总结. 无人机系统一般可以分为地面站, 飞控导航系统, 通讯网络, 传感器系统与指挥控制系统五部分 组成. 由于其飞控软件、通信协议、传感器、操作系统等软硬件设备相关多基于通用芯片, 开源系 统、通用协议与软件架构进行设计开发, 在设计时也大多以易用性、轻量化等原则为主, 而忽略安全 性[59]. 这样的设计导致无人机系统会存在明显的安全漏洞, 使得系统架构的每一个层次都可能受到 针对其脆弱性特点的恶意攻击, 据调研, 美国普渡大学, 密歇根大学, 加州大学欧文分校, 德州农工等 国外知名高校以及西安电子科技大学, 西北工业大学, 华东师范大学, 浙江大学等国内院校正在开展 相关的研究工作, 具体包括传感器安全, 软件安全, 通讯网络安全和任务系统安全.
2.4 无人机系统智能安全
新一代人工智能极大推动了下一代无人机任务系统的发展, 无人机系统架构和软硬件结构将大 幅革新, 然而大规模的智能化应用将会给无人机系统带来较大的风险. 首先, 多数人工智能模型是黑 盒模型, 具有不可解释性. 这些模型可能本身存在缺陷, 可靠性不足, 这极有可能导致其在动态复杂 的任务环境中出现错误的决策行为. 其次, 由于人工智能模型的线性特性缺乏对扰动的抵抗能力而造 成的[91]. 即使决策“可靠”的模型也同样容易受到对抗攻击, 攻击者只需要在输入样本中添加精心构 造的、隐蔽的扰动就可以很容易地让模型决策出错, 如数据污染攻击、后门攻击等. 在无人机系统 中, 相机和 LiDAR 的感知数据往往会作为人工智能模型的数据输入, 因此极易被当成攻击的切入点. 如 Cao 等人通过恶意构造的点云数据成功通过 LiDAR 欺骗目标跟踪检测器. 在此基础上, Chen 等 人提出同时攻击相机和 LiDAR 的方式会带来更佳的攻击效果. 对于无人机系统来说, 这样的攻击方 式可以用来干扰控制算法[92]和攻击检测模型[93], 生成伪装对无人机上用于侦察人工智能算法进行 对抗样本攻击, 来降低分类算法的准确率, 也可以用来骗取无人机在侦察任务中寻找敌人的活动. 这 些因素会增加支持无人机智能化的软硬件、算法和大规模数据应用的脆弱性, 给无人机自主智能的 实时性、精确性和完备性带来智能安全也将带来更为严峻的智能安全挑战.
3 无人机系统自主安全
本节首先定义了“自主安全”新概念; 其次, 基于 IPDRR 模型与 OODA 环构建了自主安全要素 表征模型; 然后, 建立了无人机系统自主安全模型, 并提出无人机系统自主安全能力分级.
3.1 自主安全概念
无人机自主要求其具有自主感知、信息处理、决策以及执行自主决策的能力. 通过自主控制, 无 人机可以根据环境和任务的变化和不确定性自适应地、自主地调整控制目标. 鉴于自主性是无人机 系统中人、机、环境的核心关键, 我们提出“无人机自主安全”新概念. 所谓 “自主安全”是指面向系 统高度自主或智能自主时, 无人机本体所具备的自主提供一种高效可靠的任务达成和安全保障的能 力 (能够自主执行并完成任务、自主达到并保持系统安全的能力). 这种能力不仅包含无人机本体在 执行任务时具备感知、规划、决策、学习、行动以及人-机交互的能力, 也包括在面临物理、信息、 智能等多域威胁时, 无人机本体具备自主安全威胁感知、检测、识别、规避与防御等能力. 其中, 安 全是保障功能, 自主是内核, 自主安全资源配置、外部资源以及人工干预程度为衡量指标. 则其内涵 即为在特定任务场景下, 无人机本体不依赖或很少依赖外部资源和人工干预, 以最小的自主安全资源 配置, 最高程度地自主完成任务, 最大限度地自主避免不安全状态和任务环境中的不安全因素, 确保 本体不遭受突发或者恶意的破坏或损毁, 以及不形成对人、环境的威胁.
3.2 自主安全要素表征模型
IPDRR [105] 模型是由美国国家标准与技术研究院 (National Institute of Standards and Technology, NIST) 所提出的一种网络安全框架, 主要包括识别 (Identify)、防护 (Protection)、检测 (Detection)、响应 (Response) 和恢复 (Recovery) 五个重要环节. IPDRR 实现了“事前、事中、事后”的 全过程覆盖, 从以防护为核心的模型, 转向以检测能力为核心的模型, 变被动为主动, 最终达成自适 应的安全能力. OODA 也称 “博伊德循环” 或 “决策周期环”, 是美国空军军官 John Boyd 在 20 世 纪 70 年代基于对抗性决策提出的作战理论. 其本质是被动式, 没有观察 O 就不会有判断 O、决策 D 和行动 A. 在复杂环境中, 人机环境系统的 OODA 需要 “零信任” 模式, 尤其是在充满 “诡、诈” 的博弈智能中, 从 “是什么” 到 “应是什么” 之间完成 “为什么” 的过程跳跃. 融入各种智能技术的 OODA 环将呈现出全维感知、快速准确、优化高效、实时精准的特点, 为战场决策的科学化、进而 夺取主动权提供了新的视角和手段。
3.3 面向多域威胁和系统高度自主的自主安全能力模型
根据自主安全定义可知, 面向多域威胁和系统高度自主的无人机系统自主安全中, 无机本体是关 键, 安全是保障, 自主性是内核, 安全资源配置、外部资源以及人工干预依赖程度优化是支撑. 本节 我们采用 P ASS (Power of Autonomous Safety & Security) 表示无人机在执行特定任务时、对人和 环境产生威胁时、以及无人机系统遭遇物理、信息、智能等多域安全威胁时, 无人机本体所具备的 自主与安全保障能力, 其中 Safty & Security 表征面向多域威胁的安全性.
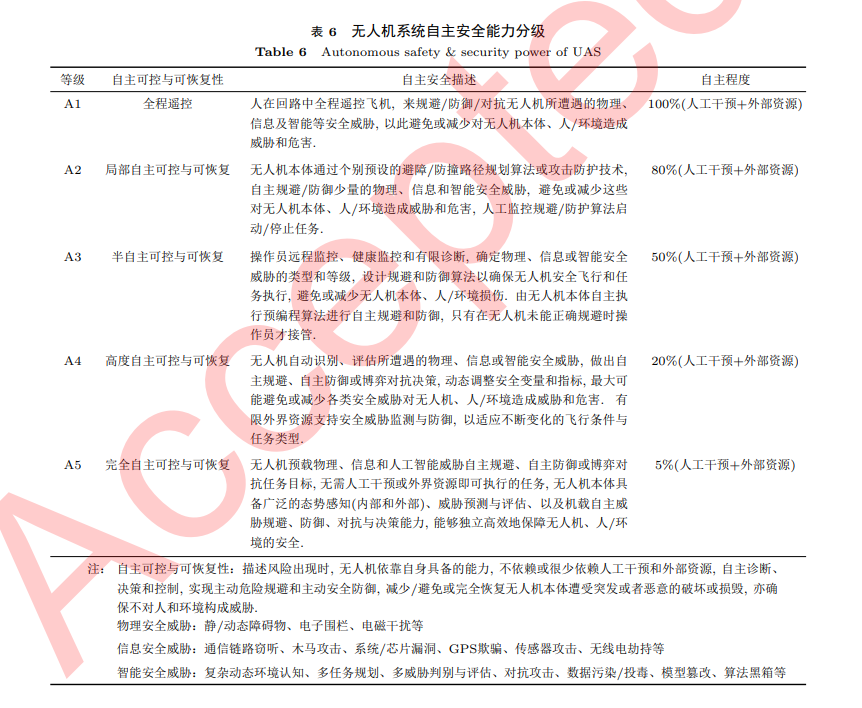
3.4 自主安全能力分级
在本文所提出的无人机自主安全定义和面向多域威胁自主安全模型下, 无人机系统自主安全是 无人机本体以自动的方式持续地执行部分或全部的安全威胁规避与防御任务. 即通过各种机载传感 器 (如相机、雷达、红外、GPS、惯性传感器等) 来识别无人机所处环境和状态, 并根据所获得的环 境和状态信息, 自主分析判断所面临的系统异常或物理、信息、智能等多域威胁, 从而自主地规避和 防御威胁, 尽量减少/避免或完全恢复无人机本体遭受突发或者恶意的破坏或损毁, 亦确保不对人和 环境构成威胁, 最终实现自主安全.
4 总结与展望
自主安全更契合无人机系统安全理念, 也符合未来智能无人系统的发展趋势. 本文提出了无人 机自主安全概念, 并给出初步定义、模型和分级. 但是要从理论内涵到技术关键, 更加准确、完整地 开展无人机自主安全系统性研究, 必须要更多、更广泛地结合实际工程, 以真正解决工程实际安全问 题关切作为评价标准, 逐步建立科学完善的无人机系统自主安全理论框架和技术体系还有大量的挑 战需要面对. 例如:
第一、有效的多域自主安全表征问题. 美军在多域战中首先关注的就是态势表征问题, 因为各域 内安全威胁描述的载体、数据组织形式等方面存在很大的差异, 要想在时间、空间、属性、语义等 维度得到表示、关联对齐, 以便实现高效挖掘分析是十分困难的. 对无人机系统, 多域安全特征表述 首先需要考虑资源、环境、任务、成本的约束, 同时还需结合具体应用解决用户的实际需求. 多源、 异构、异步、跨模态、跨语义等数据呈现特征, 由多域威胁导致域间数据共生特性难以挖掘等难题, 是实现多域威胁无人机自主安全研究首先要面对的问题.
第二、信息不完备、不对称导致安全态势不确定问题. 无人机系统自主性能的不断提升, 对外部 资源、人为干预的依赖愈加减少, 这可看作 “主动” 资源受限、电磁拒止行为; 实际战场环境或特殊 应用场景下 “被动” 资源受限、电磁拒止将是更加严峻的挑战. 在资源受限、电磁拒止条件下, 甚至 加上战场的对抗、博弈情形, 信息不完备、不对称必然造成的无人机系统安全认知的不确定, 系统更 多只能依靠自身能力进行安全态势评估, 鲁棒的可信安全评估和长周期可靠的自主推理是十分困难 的, 考虑到飞行器的运动体特点, 这又是必须实时面对的.
第三、无人机系统全状态安全的快速响应与迭代控制. 考虑多域威胁, 必须兼顾全状态安全目 标, 比如系统躲过了电子干扰, 但是核心数据可能被窃取, 同样是不能接受的. 传统单域威胁消减方 案、防护手段和控制策略很难有效处理多域并发、状态多维度、任务多约束的问题, 当某一域存在 威胁, 会导致无人机系统其它域的不稳定甚至崩溃. 如何融合 IPDRR 与 OODA 两者的要素, 解决 优化指标和优化策略设计, 既有数学上的挑战, 更要结合实际系统需求精心处理, 以解决对安全威胁 的快速响应与全状态优化问题.