
我们比较了四种分布式机器人群聚类算法对来自群内恶意机器人的伪装攻击的抵御能力。这些聚类算法是 DBSCAN 和 k-Means 的分布式变体,经过修改后可用于只能进行本地通信和本地距离测量的分布式机器人群。我们让 k-Means 和 DBSCAN 的这些分布式变体遭受恶意伪装攻击,并观察聚类性能受到的影响。然后,我们对每个变体进行修改,使其包含一个分布式入侵检测和响应系统(IDRS),以检测恶意机器人,并在受到攻击时保持群的完整性。我们在模拟和包含 25 个 Kilobot 机器人群的硬件测试平台上对所有四种变体进行了评估。我们发现,将数据集中在蜂群内会使蜂群更容易受到恶意攻击,而依赖本地消息传递的分布式 IDRS 能有效识别恶意机器人,并减少其对蜂群聚类性能的负面影响。
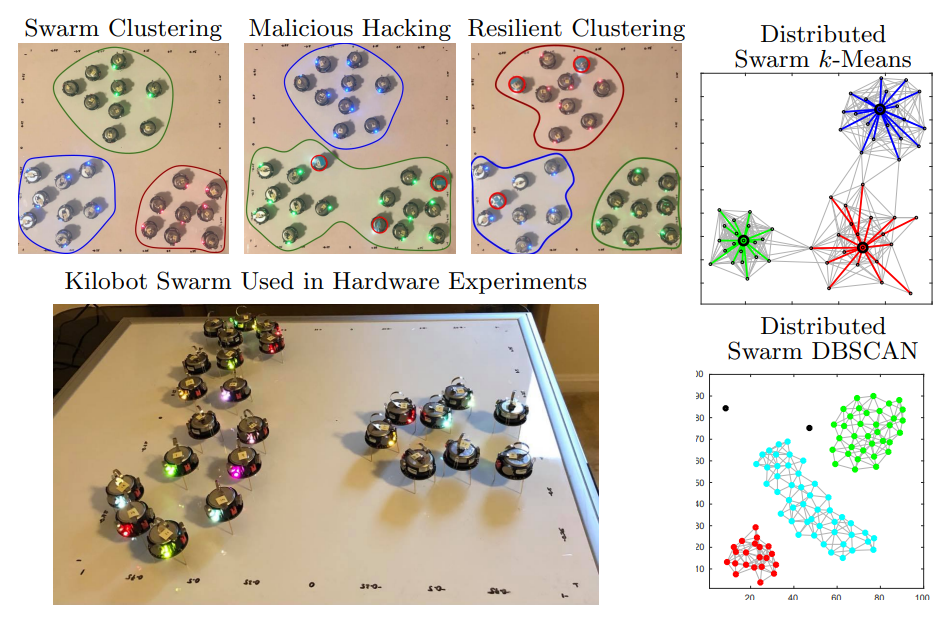
图 1. 上:我们评估了分布式蜂群聚类算法对恶意伪装攻击的抵御能力(中间),并实施了保护蜂群的安全措施(右)。颜色叠加表示机器人集群,红色圆圈勾勒出恶意机器人。右:k-Means(左)和 DBSCAN(右)算法的变体,经修改后可用于使用本地通信和定位的机器人群。左下:在由 25 个 Kilobots 组成的蜂群上进行的硬件实验。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年12月21日
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年12月21日
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日