
由于其复杂性,城市地区对于地面战来说是一个具有挑战性的多维环境。最近的技术进步使军队能够利用不同大小的无人地面车辆(UGV)来支持各种任务。本论文介绍了为一些通用 UGV 蜂群开发的搜索和杀伤任务制导算法,这可能是一个有吸引力的应用,特别是对于在城市环境中运行的小型 UGV。研究通过一系列计算机模拟,评估了算法在室内和室外城市环境中执行此类任务的可行性和有效性。所开发的模拟可以改变许多参数,从而在使用不同的环境、平台、传感器和武器时接近真实情况。本文介绍的计算机模拟还可帮助军事领导人选择关键任务参数,以最大限度地提高未来潜在交战的结果。
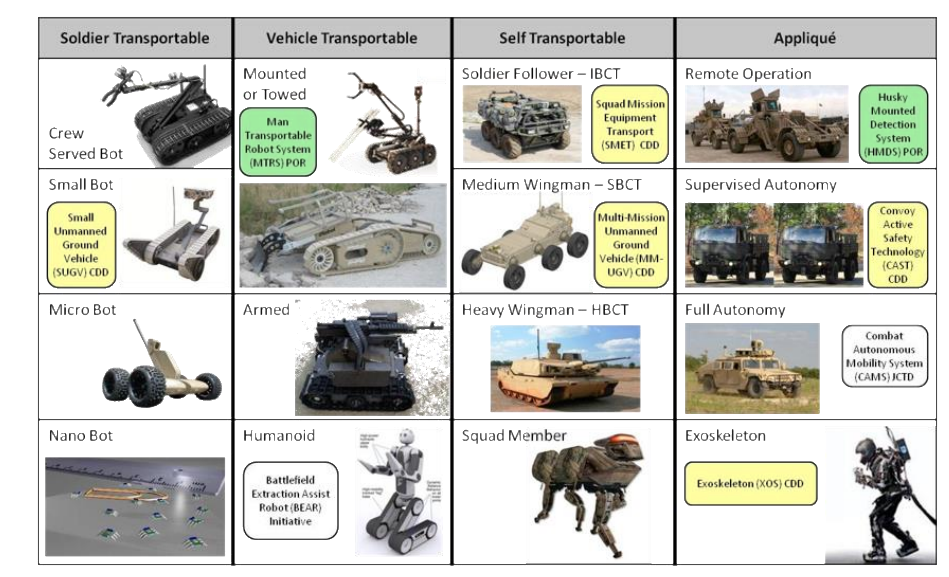
图:美国防部陆军UGV战役计划

图:美国防部陆军UGV能力时间表
由于多层结构、新的交战条件以及对军民关系的考虑,城市地区的战斗极其复杂和具有挑战性。最近的技术进步使军方能够采用机器人平台,如爆炸物处理、重型物品装载、火力下的地面状况修复等,帮助克服城市环境中的作战挑战(Gage,1995 年)。军用机器人领域的一个新兴趋势是蜂群机器人技术。根据美国国防部(DoD)机器人系统联合项目办公室(RS JPO)2011 年发布的无人地面系统路线图报告,计划在未来 25 年内开发出具有作战能力的武装 UGV(国防部,2011 年,41)。
本论文评估了三种算法(表 1),即最小访问单元(LVC)制导、高级最小访问单元(ALVC)制导和粒子群优化(PSO)算法在三种不同环境open space、室外和室内,以满足 UGV 搜索和摧毁任务的适用性。UGV 的任务分为两个阶段。第一阶段是搜索阶段,其有效性的衡量标准是区域覆盖。第二阶段是跟踪和交战阶段,其效果衡量标准是结束交战所需的时间(迭代次数)以及蓝方和红方部队的伤亡人数。
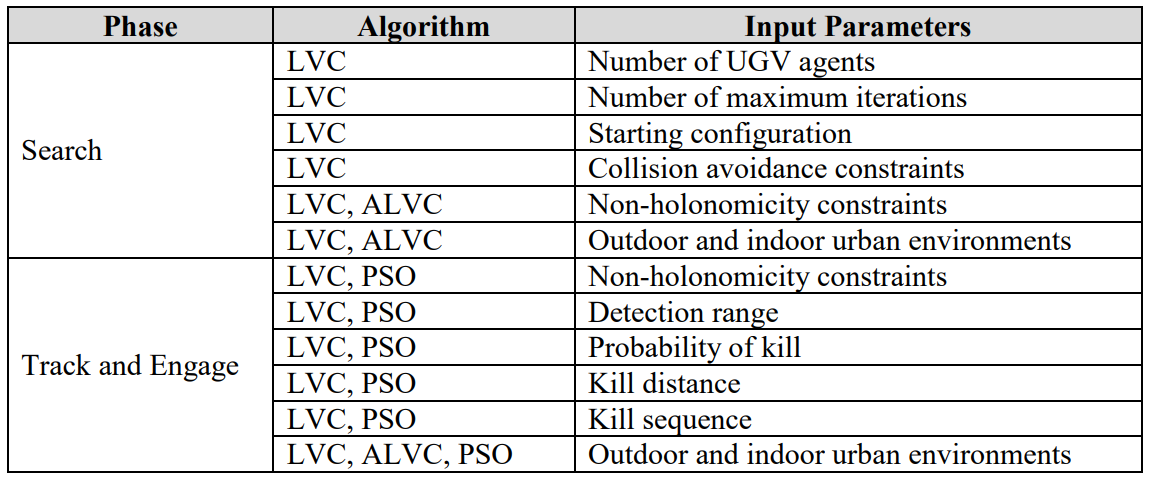
表1 本文研究的输入参数综述。
本论文中开发的 LVC 制导算法在空地、室外和室内城市行动这三种行动中都能很好地发挥作用。引入 PSO 算法后,在跟踪和交战阶段定位目标所需的时间进一步缩短了约五倍。然而,PSO 算法在室内行动中遇到了困难,因为它无法克服 UGV 智能体与被探测到的敌方智能体之间的障碍。由于 PSO 算法不会改变交战顺序或杀伤概率,因此不会影响伤亡人数。作为对 LVC 制导的改进而开发的 ALVC 制导算法运行良好,对区域覆盖有显著影响,但仅限于搜索阶段。与 PSO 算法类似,ALVC 制导算法无法克服障碍物,因此不适合室外和室内城市行动。因此,需要进一步修改 PSO 和 ALVC 制导算法。
对模拟结果的分析表明,增加 UGV 的数量将有助于在更短的时间内定位目标,并提高跟踪和交战阶段的获胜概率。分析还表明,提供进入作战区域的多个入口点是有益的,因为这可以让 UGV 在更短的时间内确定敌人的位置。此外,引入非整体性约束的结果表明,非整体性驱动提高了区域覆盖率,从而使 UGV 能够在更短的时间内定位目标。但事实证明,非整体性约束对于跟踪移动目标的 UGV 来说是一个不利因素。增加探测距离更为有利,因为 UGV 对态势有更好的感知,可以更早地启动 PSO 算法,从而缩短总的交战时间。
影响伤亡人数的三个输入参数是杀伤概率、杀伤距离和杀伤顺序。蓝军伤亡人数的增减取决于这三个因素。如果红军的击杀概率越高,蓝军的伤亡人数就越少,蓝军需要的击杀距离就越长,而且蓝军最先参战。
建模概念遵循网格系统,其中作战区域被划分为 100×100 个单元。在每次迭代中,每个智能体都会通过评估紧邻的八个周边单元来确定自己的下一个位置。根据输入参数(如非自主驾驶行为和避免碰撞)和环境条件(如障碍物),周围的一些单元会受到限制。根据算法的选择,一些不受限制的单元会比其他单元更受青睐。UGV 智能体与敌方智能体之间的交战被模拟为概率事件。
