

本文探讨了人工智能(AI)技术在生成无人机(UAV)机群轨迹中的应用。所面临的两大挑战包括准确预测无人飞行器的路径和有效避免它们之间的碰撞。
首先,本文在单隐层前馈神经网络(FFNN)中系统地应用了多种激活函数,与之前的研究相比,提高了预测路径的准确性。
其次,引入了一种新颖的激活函数 AdaptoSwelliGauss,它是 Swish 和 Elliott 激活函数的复杂融合,并与缩放和移动高斯分量无缝集成。斯维什能促进平稳过渡,埃利奥特能捕捉突然的轨迹变化,而缩放和位移高斯能增强对噪声的鲁棒性。这种动态组合专为捕捉无人机轨迹预测的复杂性而设计。与所有现有的激活函数相比,这种新激活函数的精度要高得多。
第三,提出了一种新颖的综合碰撞检测、规避和批处理(ICDAB)策略,它融合了两种互补的无人机碰撞规避技术:改变无人机轨迹和改变其起始时间,也称为批处理。这种融合有助于克服两种技术的缺点:第一种技术是减少轨迹操作次数,避免路径过于迂回;第二种技术是减少批次规模,减少整体起飞时间。
近年来,无人机因其多功能性和广泛的应用潜力而越来越受欢迎,从监视和监测到交付和运输,无所不包。然而,无人机在复杂环境中的安全高效运行仍然是一项重大挑战,尤其是在涉及多个无人机的情况下。一个关键问题是需要优化无人飞行器的轨迹,以实现各种目标,如尽量缩短飞行时间、避免碰撞和扩大覆盖范围。传统的轨迹规划和控制方法在处理现实世界场景的复杂性和不确定性方面往往能力有限,而且可能无法扩展到大型无人机群。
之前的研究(如 Lai (2020)、Xue (2017) 以及 Qiu 和 Duan (2020))已经证明了利用非线性优化技术的功效。最近,Xu 等人(2024 年)将多目标优化用于轨迹生成。当需要快速改变轨迹时,优化程序太慢且不具有自适应能力,因此人工智能技术成为首选。人工智能技术,尤其是基于机器学习和神经网络的技术,使无人机能够从数据中学习并适应不断变化的条件,从而在应对这些挑战方面展现出巨大的前景 Lai(2020)。
这些研究涉及利用双曲切线函数(Tanh)、Sigmoid 等激活函数训练单隐层的 FFNN。所使用的激活函数对路径的预测精度不高,因此我们首先要改进这方面的问题。我们在单隐层 FFNN 中系统地应用了多种激活函数,并进行了综合比较分析。除了 Sigmoid 和 Tanh 外,我们还使用了整流线性单元(ReLU)、泄漏 ReLU、Swish、Elliot 和 Maxout。
其次,为了追求更高的轨迹精度,我们引入了一种新型激活函数 AdaptoSwelliGauss,它超越了相同神经网络架构中常用的同类激活函数。该函数结合了能捕捉平滑过渡并保持轨迹连续性的 Swish 激活函数和能捕捉方向和速度突然变化的 Elliot 激活函数,以及能使激活函数对噪声数据具有鲁棒性的缩放和位移高斯。
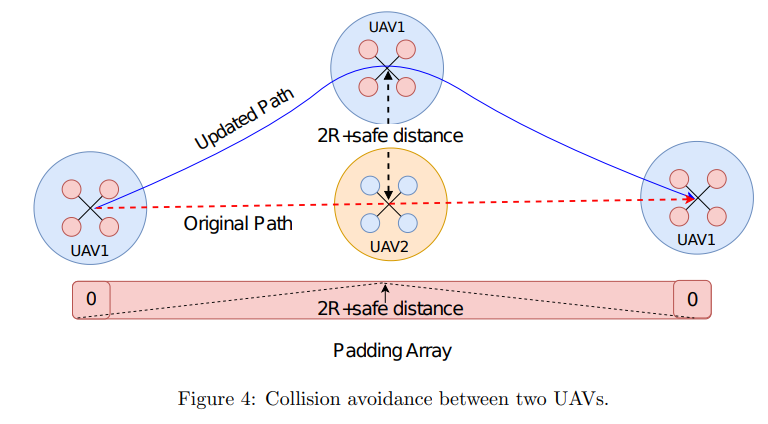
在自主无人机中,碰撞检测和规避的关键部分对确保其运行的安全性和效率起着至关重要的作用,这也是我们的第三个重点。当考虑到多架无人机同时起飞时,这些功能的重要性就更加突出了。无人飞行器之间的碰撞检测非常简单,但是有很多方法可以通过改变飞行轨迹来避免碰撞。Guo 等人(2021 年)介绍了一种流行的方法--圆弧轨迹几何法(CTGA)。假设两架无人飞行器在路径上的某一点发生碰撞,该技术会对其中一架无人飞行器的路径添加一个小扰动。这种算法的缺点是容易陷入操纵循环。对一个无人飞行器轨迹的任何改变都可能无意中造成与其他无人飞行器的碰撞,从而导致棘手的情况。此外,对无人飞行器轨迹的频繁操作可能会导致飞行路径错综复杂,从而影响无人飞行器群的整体效率。
另一种避免无人机碰撞的辅助技术是改变它们的起始时间。Sastre 等人(2022a)和 Sastre 等人(2022b)提出了这样一种流行的方法。他们采用了一种分批机制,创建具有非碰撞轨迹的无人飞行器群,以促进安全飞行。然而,多批次的创建引入了一个时间密集的过程,延迟了无人机群的整体发射。
在本文中,我们介绍了一种先进的碰撞检测和规避算法,称为 ICDAB 算法。在这里,我们首先改进了 Guo 等人(2021 年)提出的 CTGA 算法,然后将这种规避算法与批处理机制相结合,最终形成了我们的算法。
本文的其余部分安排如下: 第 2 节回顾了相关文献,第 3 节介绍了我们提出的算法和方法,第 4 节展示了结果,第 5 节总结了本文并提出了未来的工作方向。

