
本文提出了一种利用机器学习进行视觉感知的自主对接新方法,特别针对探头与锥套式空中加油场景。自主载具已在民用与国防领域广泛应用,其与周围环境及其他载具自主交互的能力对未来作战至关重要。依赖信号或惯性传感器的传统方法存在干扰、阻塞及漂移等显著局限。本研究致力于开发基于计算机视觉的解决方案以克服这些限制。论文引入了一种称为“相对矢量导引”的新流程,该流程利用双目标检测与机器学习,仅通过图像处理即可估算空中加油过程中受油机与锥套间的相对位置。所提出的解决方案利用目标检测模型将二维图像点与三维物体点进行检测与匹配,从而实现无需外参相机标定的精确位姿估计与矢量计算。该流程通过基于AftrBurner图形引擎的广泛仿真验证,该引擎提供了逼真图像与动态场景。仿真结果表明该流程具有精确性、可靠性、实时性能及抗遮挡能力。此外,通过迁移学习技术在真实场景中测试了相对矢量导引方法。研究结果表明场景增强显著提升了模型泛化能力与精度,有效弥合了仿真与实际的差距。真实环境测试证实该方法可靠、精确(接触时误差小于3厘米)且快速(56帧/秒),即使在多变环境条件下仍保持优异性能。总体结果表明,所提出的解决方案能在复杂动态环境中有效执行自主对接,从而提升自主空中加油及相关应用的能力。
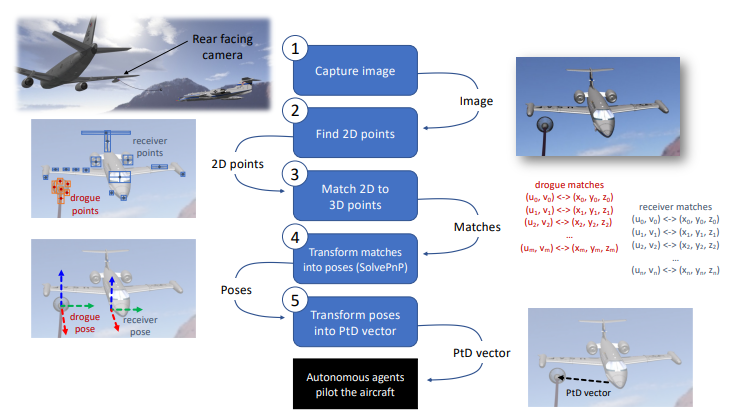
图3:采用双目标检测(DOD)的完整相对矢量导引流程包括:1)捕获图像;2)运用机器学习定位图像中与探头/受油机及锥套/加油机上已知三维特征对应的二维点;3)匹配二维与三维点;4)通过PnP求解算法将匹配点转换为六自由度位姿;5)利用坐标系变换计算探头至锥套的矢量。
背景与动机
自主载具正日益普及于民用与国防领域。例如,自动驾驶汽车穿梭于城市街道,提供交通服务并协助无法驾驶的人群提升出行能力[1]。无人机将包裹送达用户门口并勘察受灾区域以支援救灾工作[2]。自主舰船探索深海的同时,无人飞行器执行监视与侦察任务以保障国家安全[3]。这些技术通过提供高效物流、增强安全性及创新性复杂问题解决方案,已直接或间接成为日常生活中不可或缺的组成部分。
尽管应用日益广泛,自主载具与周围环境及其他载具交互的能力仍存在局限。若无法实现自主对接,则无法执行空中加油、海上舰船间货物转运或航天器对接维护与人员转移等关键任务。这些限制制约了其作战半径、任务时长与整体效能。自主对接可突破这些障碍,带来自动化维护修理、燃料/货物/人员/数据传输等诸多优势,显著提升自主载具的作战效率。
目前,多数对接操作因成功所需的高复杂度与精度而未能实现自动化,通常需“人在回路”参与。依赖人类操作员是因为其能适应意外变化并实时做出复杂决策。人类智能使其能在几乎所有条件下泛化操作,在背景、光照与视角变化时仍完成对接。然而,这种依赖带来显著局限:人类需大量培训与经验,尤其在执行空中加油[4]、太空交会与近距离操作[5]及海上舰船对接[6]等复杂对接操纵时。此外,人类易受体力衰竭、精神疲劳、注意力分散、情绪困扰、任务饱和等负面因素影响,常导致失误、载具与财产损毁、人员伤亡或更严重后果[7,8,9]。
虽然通过物理隔离操作员并远程控制载具可缓解部分局限,但该方法不可行。地面站远程控制受高通信链路延迟阻碍,无法满足实时性要求。这种延迟导致在需要快速响应的动态环境中无法准确可靠控制载具[10]。
用能实现自主对接的智能机器取代人类操作可解决这些局限。例如在太空探索中,自主对接可确保航天器与国际空间站及时精确对接,这对乘员安全与任务成功至关重要。在海事应用中,自主对接能促进恶劣海况下舰船间货物转运,在保障效率与安全的同时避免人员风险。对于空中加油,精确可靠的自主对接系统可扩展无人机构航程而无需人类飞行员,从而增加任务时长与作战效能。因此,自主对接对充分释放自主载具潜力至关重要。
问题陈述
实现自主对接需开发精确、可靠且快速的解决方案。传统基于信号与惯性导航方法存在显著缺陷:信号方法(如GPS)易受干扰与阻塞[11],在许多场景中不可靠;惯性导航系统则随时间漂移,导致累积误差降低精度[12]。这些局限要求采用更稳健的方法。
计算机视觉提供了具吸引力的替代方案。通过使用相机与图像处理算法,视觉系统可实时感知与解读环境。然而,当前视觉解决方案仍面临重大挑战,尤其在适应环境变化方面,如动态背景、多变光照条件与视角变化。此外,现有视觉算法常未能达到对接耦合器精确对齐与误差阈值最小化所需的高精度,导致潜在对接失败与设备损毁[13,14,15]。应对这些挑战对开发稳健可靠自主对接系统至关重要。
在此背景下,精确性、可靠性与速度尤为关键。精确对接确保载具跟踪正确目标,实现耦合器高精度对齐,并最小化误差阈值以安全连接且不损伤敏感设备。可靠性保证对接过程在各种条件下可信执行,降低失败风险。速度至关重要因为作战环境可能瞬息万变,自主智能体须实时响应。例如在探头与锥套式空中加油过程中,锥套因湍流产生剧烈运动。成功对接要求智能体对锥套的感知必须具有最小延迟,否则将导航至锥套历史位置而非实时位置。
当前缺乏满足这些严苛要求的稳健视觉解决方案,构成自主对接技术的显著空白。因此,本论文旨在开发新型计算机视觉算法,通过确保高精确性、可靠性与实时性能应对这些挑战。实现该目标对全面实现自主对接能力、显著提升多领域自主载具作战效率与安全性至关重要。
研究目标
本节主要目的在于明确指导本研究的具体目标。确立清晰目标对聚焦研究、指导方法学及确保研究有效贡献于自主对接领域至关重要。本研究目标如下:
- 开发新型计算机视觉解决方案:创建稳健精确的计算机视觉解决方案,能在多变环境条件下促进自主对接,改进现有目标检测与位姿(位置与朝向)估计技术。
- 确保实时性能:保证所开发解决方案以最小延迟运行,支持实时决策与执行。
- 最小化误差阈值:实现对接耦合器高精度对齐,最小化误差阈值并确保安全连接。
- 在仿真与真实场景中验证算法:通过仿真与实际应用测试与验证算法效能与可靠性。
主要应用场景:自主空中加油
尽管本工作适用于几乎所有对接场景,但选择自主空中加油(AAR)(特别是探头与锥套式加油)作为主要应用场景源于其复杂性。空中加油因其快速变化与不稳定特性仍属最复杂对接操纵之一。在飞行中将受油探头对接至加油机锥套通常需要训练有素且经验丰富的人类飞行员具备快速反应能力。此外,与伸缩管式加油相比,探头与锥套式加油常被认为更具挑战性,因为柔性软管-锥套组件受湍流影响产生不可控且不可预测运动[16]。因此,若所提算法在探头与锥套式加油中表现良好,则很可能在误差容限更大、复杂性更低的其他对接操纵中同样表现优异。空中成功对接所需的湍流条件与精确操纵为所提对接解决方案提供了稳健测试环境,确保其能良好泛化至其他自主对接场景。这使得自主空中加油成为测试与验证所开发计算机视觉算法精确性、可靠性与速度的理想案例。
研究概述
本论文旨在通过专注于机器视觉感知技术开发与验证以推进自主空中加油领域发展,重点研究对接操纵过程中的相对导航。所呈现的研究分为两项主要研究,每项研究应对问题的关键方面并贡献于实现可靠高效自主对接的总体目标。
研究1引入了一种称为“基于双目标检测的相对矢量导引”的新型视觉解决方案。该方法利用先进图像处理技术检测与跟踪加油机与受油机的关键特征。通过使用双目标检测,该方法提供稳健精确的相对定位数据,这对精确对接操纵至关重要。该解决方案的效能通过广泛蒙特卡洛仿真得到全面验证,证明了其在多种作战场景与环境条件下的潜力。
在研究1基于仿真的成功基础上,研究2通过机器迁移学习将所提解决方案过渡至实际应用。该研究涉及适配基于合成图像训练的模型以处理真实世界的复杂性与变化,确保解决方案在实际环境中的稳健性与适用性。向实际应用的过渡是弥合理论研究与作战部署间差距的关键步骤,最终旨在提升自主空中加油任务的可靠性与安全性。
下一章将审视构成这两项研究基础的相关工作与文献。


