
随着技术持续进步,无人机(UAV)在监视与军事应用领域展现出巨大潜力。近年来无人机侵入非授权区域事件激增,武装无人机在现代战争中亦被广泛使用。因此研究无人机定位与追踪入侵无人机的方法,以防范非授权区域监控与敌对无人机攻击具有重要价值。本硕士论文研究如何协同使用两架自主搜索无人机追踪目标无人机。
为定位目标无人机,研究通过提取射频(RF)信号方位角与接收信号强度(RSS)数据获取模拟测量值。为实现目标追踪与位置预测,每架搜索无人机搭载扩展卡尔曼滤波器(EKF),共同构成移动无线传感器网络(MWSN)。论文探索两种编队控制方法,使搜索无人机在追踪过程中保持队形。编队方法利用目标预测位置生成控制器跟踪的参考位置和/或参考距离。搜索无人机搭载分布式模型预测控制器(DMPC),在追踪目标的同时维持编队并规避碰撞。
研究首先通过仿真分别评估EKF、MPC及编队方法的性能并进行参数调校,随后将各模块整合为完整系统并优化仿真追踪与编队效果。实验结果显示:在目标无人机以2米/秒速度沿方形轨迹飞行、测量噪声较高的情况下,搜索无人机能以平均综合距离误差小于2米的精度实施追踪。追踪质量受目标速度提升与搜索无人机初始位置影响显著——目标高速移动及初始位置偏离参考值较大时,追踪效能明显下降。
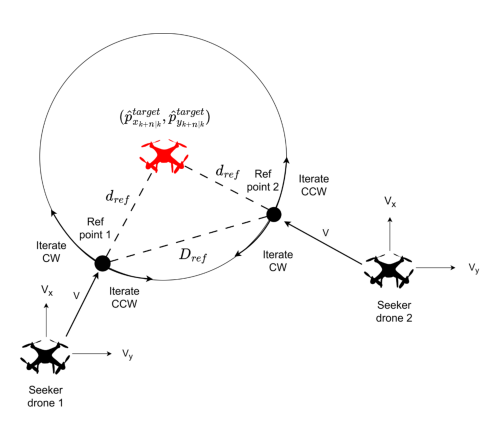
图9.2:编队控制算法示意图。扩展卡尔曼滤波器(EKF)预测的k + n个时间步长后的目标位置作为圆心。搜索无人机1与2在圆周上确定各自最近点(图中未显示)。通过沿顺时针(CW)或逆时针(CCW)方向绕圆迭代点来调整最近点位置,直至满足搜索无人机间预设参考距离Dref。圆半径保持恒定,由预设目标参考距离dref决定。搜索无人机接收速度向量作为控制信号,向调整后的参考点运动。
成为VIP会员查看完整内容
相关内容

Arxiv
204+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
140+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
204+阅读 · 2023年4月7日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
140+阅读 · 2023年3月29日