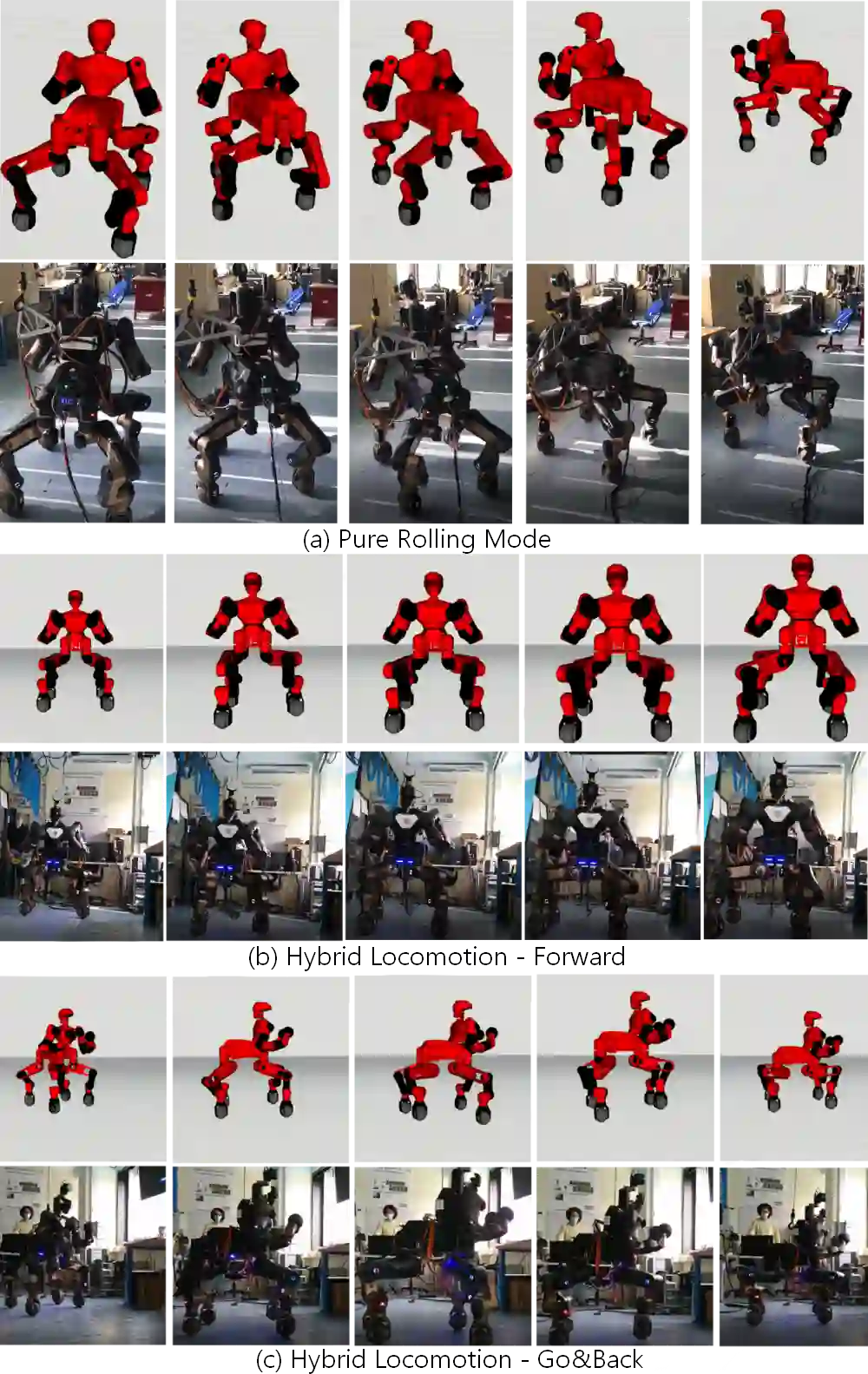
Hybrid wheeled-legged locomotion is a navigation paradigm only recently opened up by novel robotic designs,e.g. the centaur-type humanoid CENTAURO [1] or the quadruped ANYmal [2] in its configuration featuring non-steerable wheels. The term Hybrid Locomotion is hereafter used to indicate a particular type of locomotion, achieved with simultaneous and coordinate use of legs and wheels,see Fig. 1. Such choice stems at the intersection between legged locomotion and the simpler wheeled navigation, in order to get the best from both techniques: agility and ability to traverse uneven terrains from the first, speed and stability from the second. As a consequence, the problem of planning feasible trajectories for a hybrid robot shares many similarities with the legged locomotion problem: also in the hybrid case the motion of the base is reached through contact of the feet with the environment, taking into account that the wheeled feet can just push on the ground and not pull it. Forces compatible with friction cones have to be considered, while the contacts can slide just along the direction prescribed by the orientation of the wheels.
翻译:新机器人设计最近才开启了一种导航模式,例如半人马型人型CENTARO[1]或四倍Anymal[2],其配置以不可移动的轮子为主。混合轮子移动一词以后用来表示一种特定类型的移动,通过同时和协调地使用腿和轮子而实现,见Fig。1. 这种选择源自于腿脚移动和更简单的轮子导航之间的交叉点,以便从两种技术中获得最佳效果:从第一种技术、速度和稳定性中绕过不均的地形的易动性和能力。结果,混合机器人的可行轨迹规划问题与腿移动问题有许多相似之处:在混合情况下,基地运动是通过脚与环境的接触实现的,同时考虑到轮子脚可以推倒地面而不是拉动它。必须与摩擦锥相兼容的力量必须加以考虑,同时接触可以沿着轮子方向的方向滑动。