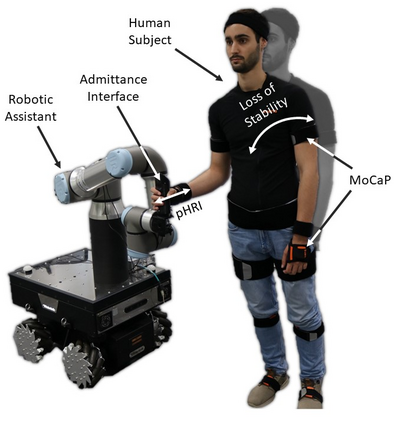
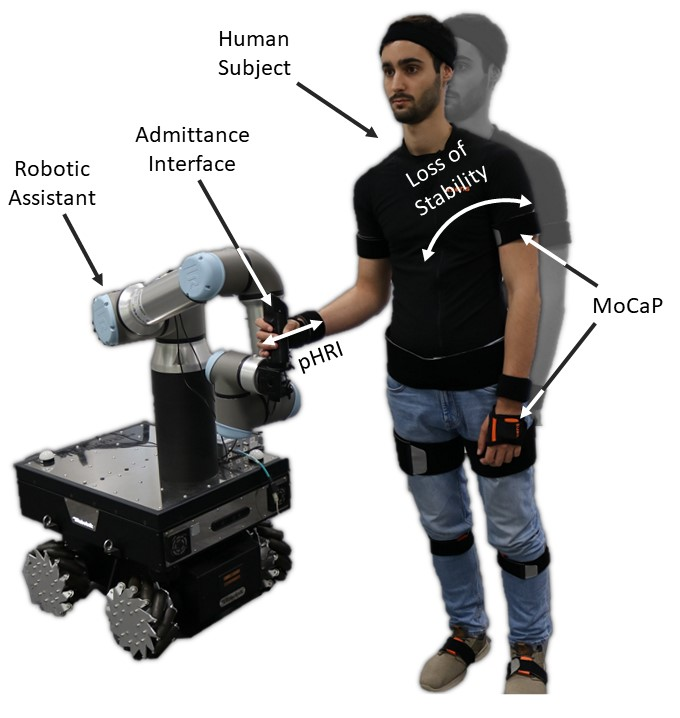
This letter presents the design and development of a robotic system to give physical assistance to the elderly or people with neurological disorders such as Ataxia or Parkinson's. In particular, we propose using a mobile collaborative robot with an interaction-assistive whole-body interface to help people unable to maintain balance. The robotic system consists of an Omni-directional mobile base, a high-payload robotic arm, and an admittance-type interface acting as a support handle while measuring human-sourced interaction forces. The postural balance of the human body is estimated through the projection of the body Center of Mass (CoM) to the support polygon (SP) representing the quasi-static Center of Pressure (CoP). In response to the interaction forces and the tracking of the human posture, the robot can create assistive forces to restore balance in case of its loss. Otherwise, during normal stance or walking, it will follow the user with minimum/no opposing forces through the generation of coupled arm and base movements. As the balance-restoring strategy, we propose two strategies and evaluate them in a laboratory setting on healthy human participants. Quantitative and qualitative results of a 12-subjects experiment are then illustrated and discussed, comparing the performances of the two strategies and the overall system.
翻译:本信介绍设计和开发一个机器人系统,向老年人或患有神经系统障碍的人提供物质援助,如Ataxia或Parkinson's等。我们特别提议使用一个移动协作机器人,配有互动辅助性整体身体界面,以帮助无法维持平衡的人。机器人系统包括一个全向移动基地、一个高薪机器人臂和一个入门型界面,作为辅助处理器,同时测量人源互动力量。人体的后方平衡是通过Mass Cental Center(COM)向代表准静态压力中心(COP)的支持多边形(SP)投影来估计的。为了应对互动力量和跟踪人类态势,机器人可以创造辅助力量,以便在损失时恢复平衡。否则,在正常的姿势或行走期间,它将通过生成混合的手臂和基本运动来跟踪最小/无对立力量的用户。作为平衡战略,我们提出两个战略,然后在实验室环境中对代表的半静态压力中心(CoP)。为了应对互动力量和跟踪人类态势,机器人可以创造出一种辅助力量,在12项试验中进行总体表现。