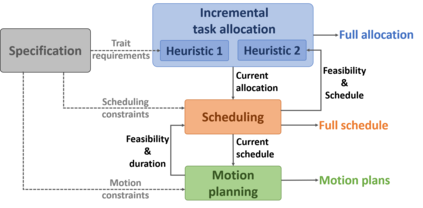
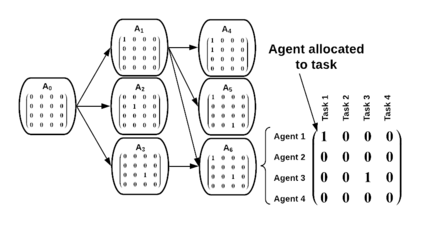
To realize effective heterogeneous multi-robot teams, researchers must leverage individual robots' relative strengths and coordinate their individual behaviors. Specifically, heterogeneous multi-robot systems must answer three important questions: \textit{who} (task allocation), \textit{when} (scheduling), and \textit{how} (motion planning). While specific variants of each of these problems are known to be NP-Hard, their interdependence only exacerbates the challenges involved in solving them together. In this paper, we present a novel framework that interleaves task allocation, scheduling, and motion planning. We introduce a search-based approach for trait-based time-extended task allocation named Incremental Task Allocation Graph Search (ITAGS). In contrast to approaches that solve the three problems in sequence, ITAGS's interleaved approach enables efficient search for allocations while simultaneously satisfying scheduling constraints and accounting for the time taken to execute motion plans. To enable effective interleaving, we develop a convex combination of two search heuristics that optimizes the satisfaction of task requirements as well as the makespan of the associated schedule. We demonstrate the efficacy of ITAGS using detailed ablation studies and comparisons against two state-of-the-art algorithms in a simulated emergency response domain.
翻译:要实现有效的多元多机器人团队,研究人员必须利用个体机器人的相对优势并协调其个人行为。具体地说,多元多机器人系统必须回答三个重要问题:\textit{who}(任务分配)、\textit{when}(安排)和 ⁇ text{how}(行动规划)。尽管已知这些问题的具体变式都是NP-Hard,但两者的相互依存关系只会加剧共同解决这些问题的挑战。在本文件中,我们提出了一个新的框架,将任务分配、时间安排和运动规划结合起来。我们采用了基于特性的延长任务分配的搜索方法,称为递增任务分配图搜索。与按顺序解决三个问题的方法相反,ITAGS的互连式方法使得能够有效寻找分配,同时满足时间安排的限制,并计算执行行动计划的时间。为了能够进行有效的相互融合,我们开发了两个类比的组合,两个类比的搜索超链接,可以优化任务要求的满意度以及任务要求的满足度,并对照详细的域域对比。我们用一个模拟的IA-I-RA法展示了国家反应的功效。