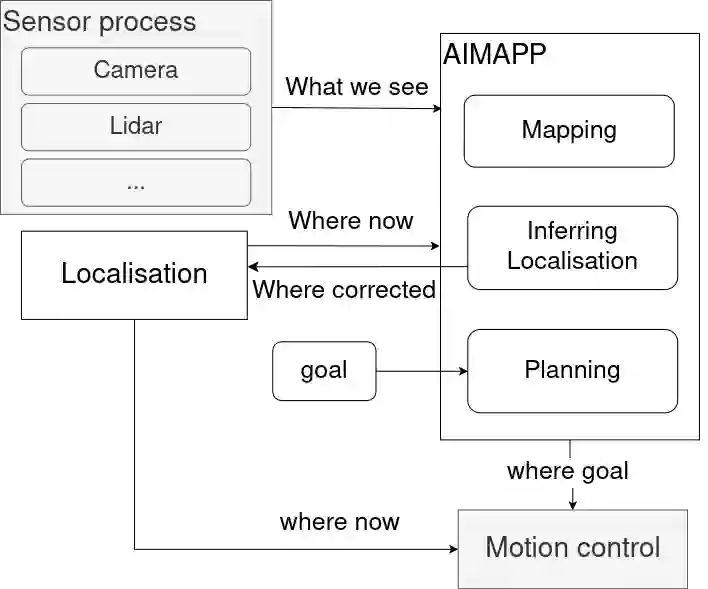
Autonomous navigation in unfamiliar environments requires robots to simultaneously explore, localise, and plan under uncertainty, without relying on predefined maps or extensive training. We present a biologically inspired, Active Inference-based framework, Active Inference MAPping and Planning (AIMAPP). This model unifies mapping, localisation, and decision-making within a single generative model. Inspired by hippocampal navigation, it uses topological reasoning, place-cell encoding, and episodic memory to guide behaviour. The agent builds and updates a sparse topological map online, learns state transitions dynamically, and plans actions by minimising Expected Free Energy. This allows it to balance goal-directed and exploratory behaviours. We implemented a ROS-compatible navigation system that is sensor and robot-agnostic, capable of integrating with diverse hardware configurations. It operates in a fully self-supervised manner, is resilient to drift, and supports both exploration and goal-directed navigation without any pre-training. We demonstrate robust performance in large-scale real and simulated environments against state-of-the-art planning models, highlighting the system's adaptability to ambiguous observations, environmental changes, and sensor noise. The model offers a biologically inspired, modular solution to scalable, self-supervised navigation in unstructured settings. AIMAPP is available at https://github.com/decide-ugent/AIMAPP.
翻译:在陌生环境中实现自主导航要求机器人能够在不确定性下同时进行探索、定位与规划,且无需依赖预定义地图或大量训练。我们提出一种受生物学启发的、基于主动推理的框架——主动推理地图构建与规划(AIMAPP)。该模型将地图构建、定位与决策统一于单一生成模型中。受海马体导航机制启发,它采用拓扑推理、位置细胞编码与情景记忆来引导行为。智能体在线构建并更新稀疏拓扑地图,动态学习状态转移,并通过最小化期望自由能来规划动作,从而平衡目标导向行为与探索行为。我们实现了一个与ROS兼容、传感器与机器人无关的导航系统,能够集成多种硬件配置。该系统以完全自监督方式运行,对漂移具有鲁棒性,且无需任何预训练即可同时支持探索与目标导向导航。我们在大规模真实与仿真环境中对比了前沿规划模型,验证了本系统在面对模糊观测、环境变化与传感器噪声时的强适应性与鲁棒性能。该模型为无结构场景中可扩展的自监督导航提供了一种受生物学启发的模块化解决方案。AIMAPP代码已开源:https://github.com/decide-ugent/AIMAPP。