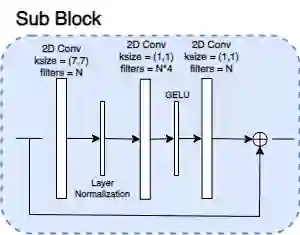
Autonomous driving perception tasks rely heavily on cameras as the primary sensor for Object Detection, Semantic Segmentation, Instance Segmentation, and Object Tracking. However, RGB images captured by cameras lack depth information, which poses a significant challenge in 3D detection tasks. To supplement this missing data, mapping sensors such as LIDAR and RADAR are used for accurate 3D Object Detection. Despite their significant accuracy, the multi-sensor models are expensive and require a high computational demand. In contrast, Monocular 3D Object Detection models are becoming increasingly popular, offering a faster, cheaper, and easier-to-implement solution for 3D detections. This paper introduces a different Multi-Tasking Learning approach called MonoNext that utilizes a spatial grid to map objects in the scene. MonoNext employs a straightforward approach based on the ConvNext network and requires only 3D bounding box annotated data. In our experiments with the KITTI dataset, MonoNext achieved high precision and competitive performance comparable with state-of-the-art approaches. Furthermore, by adding more training data, MonoNext surpassed itself and achieved higher accuracies.
翻译:暂无翻译