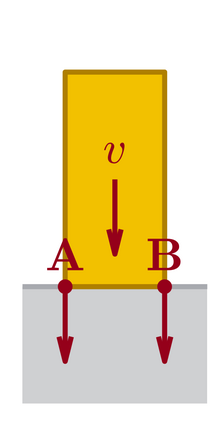
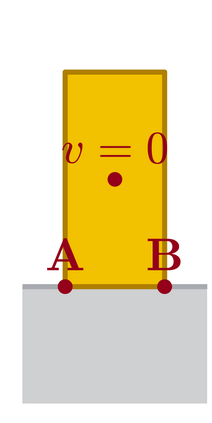
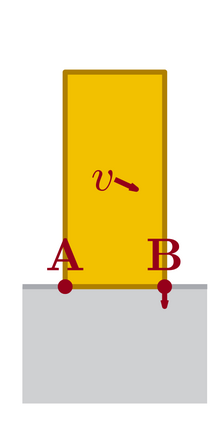
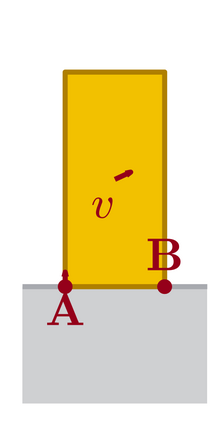
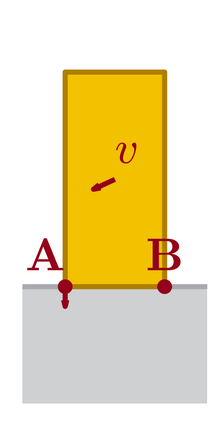
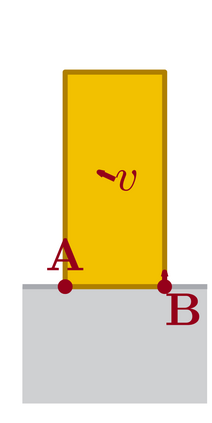
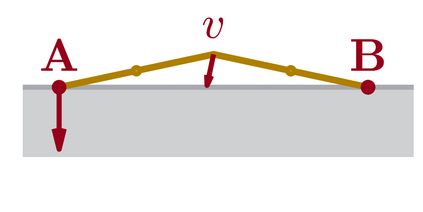
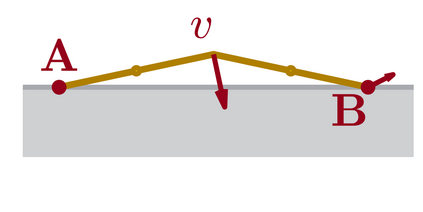
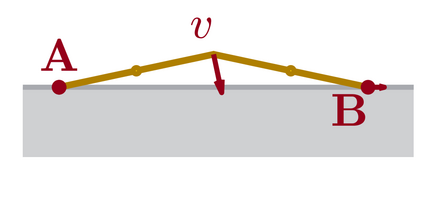
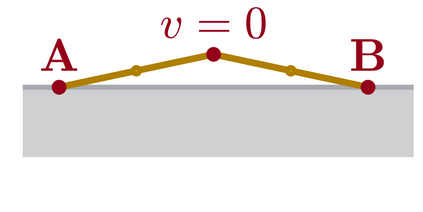
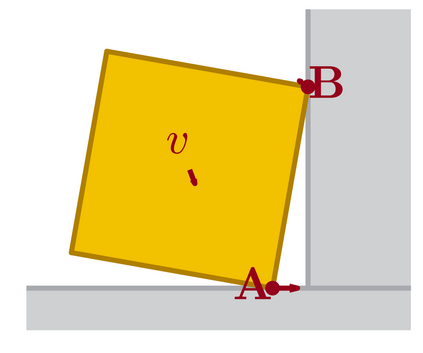
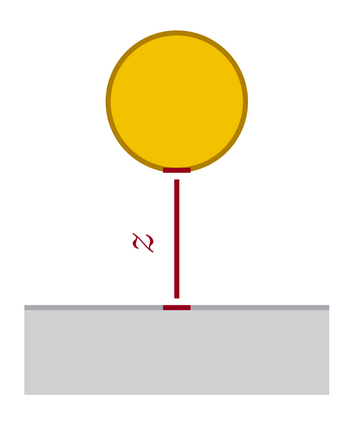
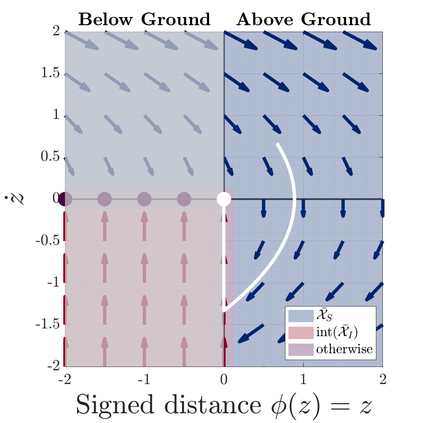
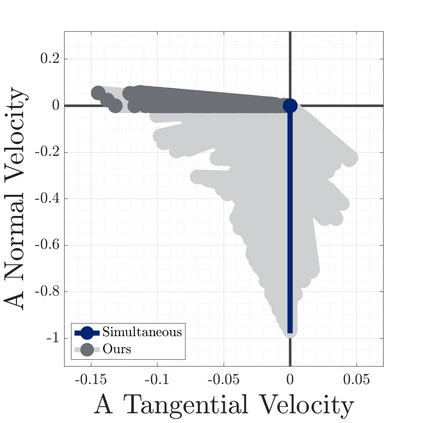
Robotic manipulation and locomotion often entail nearly-simultaneous collisions -- such as heel and toe strikes during a foot step -- with outcomes that are extremely sensitive to the order in which impacts occur. Robotic simulators commonly lack the accuracy to predict this ordering, and instead pick one with a heuristic. This discrepancy degrades performance when model-based controllers and policies learned in simulation are placed on a real robot. We reconcile this issue with a set-valued rigid-body model which generates a broad set of physically reasonable outcomes of simultaneous frictional impacts. We first extend Routh's impact model to multiple impacts by reformulating it as a differential inclusion (DI), and show that any solution will resolve all impacts in finite time. By considering time as a state, we embed this model into another DI which captures the continuous-time evolution of rigid body dynamics, and guarantee existence of solutions. We finally cast simulation of simultaneous impacts as a linear complementarity problem (LCP), and develop a probabilistically-complete algorithm for approximating the post-impact velocity set. We demonstrate our approach on several examples drawn from manipulation and legged locomotion.
翻译:机器人操纵和移动往往同时发生几乎同时发生的碰撞 -- -- 例如脚跟和脚步的脚跟和脚趾撞击 -- -- 其结果对撞击发生的顺序极为敏感。机器人模拟器通常缺乏预测此顺序的准确性,而是选择一个偏激的。当模型控制器和模拟中学习的政策被置于真正的机器人身上时,这种差异会降低性能。我们最终将这一问题与一套固定价值的僵硬体模型相调和,该模型产生一系列广泛的物理上合理的同时摩擦效应结果。我们首先将Routh的撞击模型扩展为多重影响,将其作为一种差异包容(DI)重新组合,并表明任何解决方案都会在有限的时间内解决所有影响。我们把这一模型作为状态考虑,将它嵌入另一个模型,以捕捉僵硬体动态的连续时间演变,并保证解决方案的存在。我们最后将同时影响模拟作为线性互补问题(LCP)进行模拟,并开发一种匹配后冲击速度的概率完整的算法。我们用从操纵和脚动中提取的几个例子展示了我们的方法。