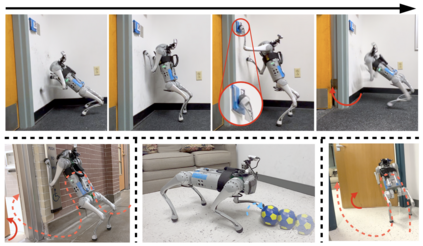
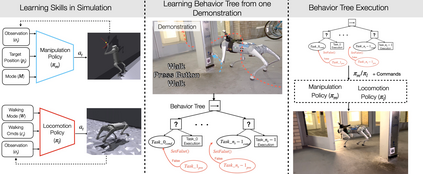
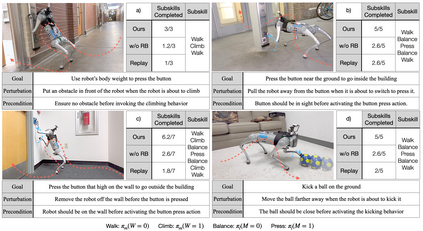
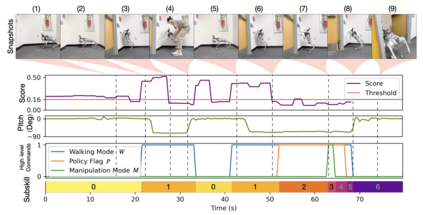
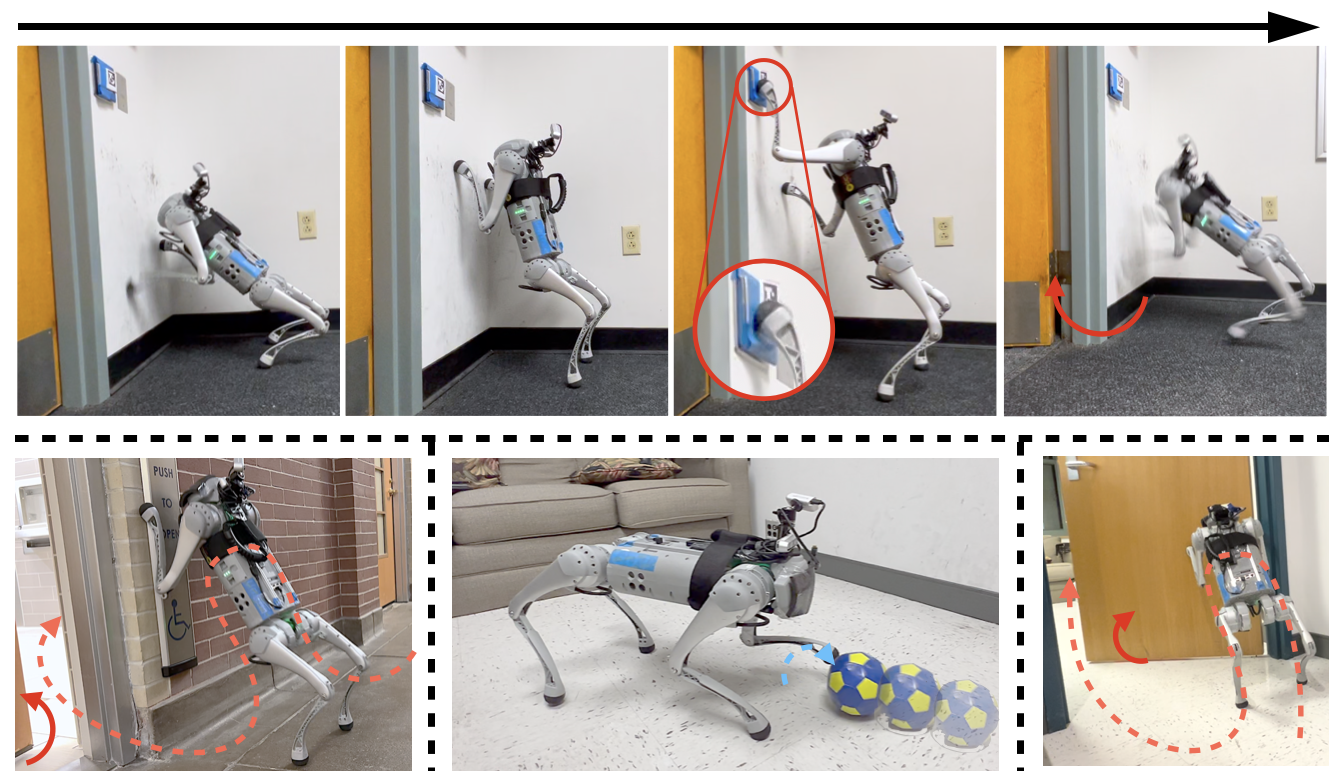
Locomotion has seen dramatic progress for walking or running across challenging terrains. However, robotic quadrupeds are still far behind their biological counterparts, such as dogs, which display a variety of agile skills and can use the legs beyond locomotion to perform several basic manipulation tasks like interacting with objects and climbing. In this paper, we take a step towards bridging this gap by training quadruped robots not only to walk but also to use the front legs to climb walls, press buttons, and perform object interaction in the real world. To handle this challenging optimization, we decouple the skill learning broadly into locomotion, which involves anything that involves movement whether via walking or climbing a wall, and manipulation, which involves using one leg to interact while balancing on the other three legs. These skills are trained in simulation using curriculum and transferred to the real world using our proposed sim2real variant that builds upon recent locomotion success. Finally, we combine these skills into a robust long-term plan by learning a behavior tree that encodes a high-level task hierarchy from one clean expert demonstration. We evaluate our method in both simulation and real-world showing successful executions of both short as well as long-range tasks and how robustness helps confront external perturbations. Videos at https://robot-skills.github.io
翻译:行走或奔跑在具有挑战性的地形上已取得了巨大进展。然而,机器人四足动物还远远落后于其生物学家伙,例如狗,它们展示了各种灵活技能,可以使用腿部超越行走从而执行一些基本的操作任务,例如与物体交互和攀爬。在本文中,我们通过训练四足机器人不仅能够行走,还能使用前腿攀爬墙壁,按下按钮并在现实世界中执行物体交互,从而朝着弥合这一差距迈出了一步。为处理这个具有挑战性的优化,我们将技能学习广泛分解成了两部分:一是运动,它涉及任何运动,无论是走路还是攀爬墙壁;二是操纵,这涉及使用一条腿在平衡其他三条腿的同时进行交互。这些技能使用课程在模拟中进行训练,并使用我们提出的 sim2real 变体将其转移到现实世界,该变体建立在最近的行走成功之上。最后,我们通过学习行为树从一个干净的专家演示中编码高层任务层次结构,将这些技能结合成一个强大的长期计划。我们在模拟和现实世界中进行评估,展示了短程和长程任务的成功执行以及鲁棒性如何帮助应对外部干扰。视频请参见 https://robot-skills.github.io。