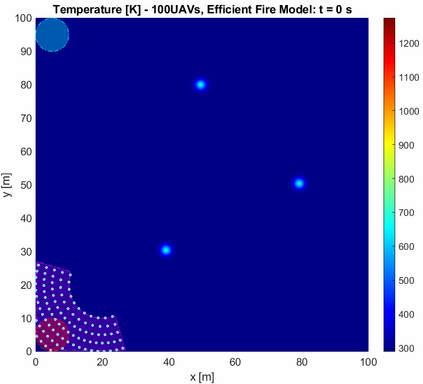
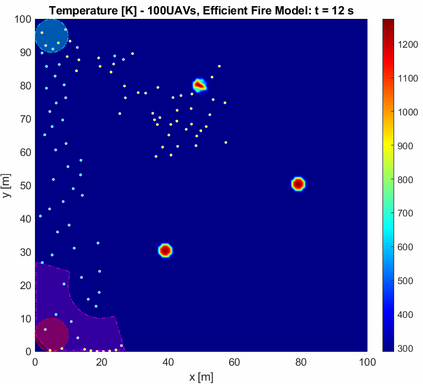
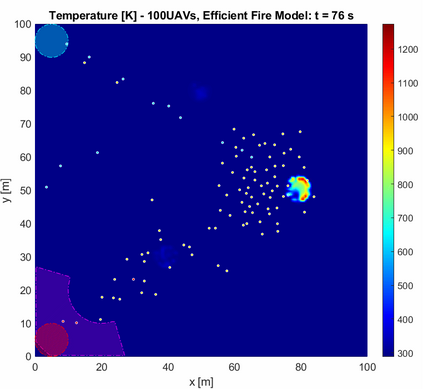
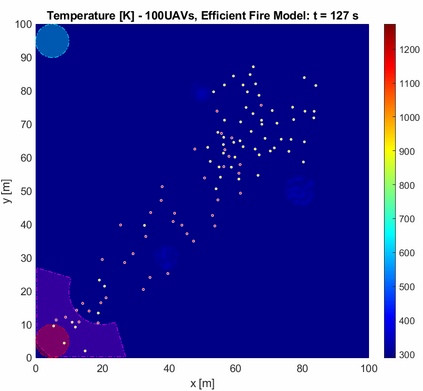
Real-time multi-agent collision-avoidance algorithms comprise a key enabling technology for the practical use of self-organising swarms of drones. This paper proposes a decentralised reciprocal collision-avoidance algorithm, which is based on stigmergy and scalable. The algorithm is computationally inexpensive, based on the gradient of the locally measured dynamic cumulative signal strength field which results from the signals emitted by the swarm. The signal strength acts as a repulsor on each drone, which then tends to steer away from the noisiest regions (cluttered environment), thus avoiding collisions. The magnitudes of these repulsive forces can be tuned to control the relative importance assigned to collision avoidance with respect to the other phenomena affecting the agent's dynamics. We carried out numerical experiments on a self-organising swarm of drones aimed at fighting wildfires autonomously. As expected, it has been found that the collision rate can be reduced either by decreasing the cruise speed of the agents and/or by increasing the sampling frequency of the global signal strength field. A convenient by-product of the proposed collision-avoidance algorithm is that it helps maintain diversity in the swarm, thus enhancing exploration.
翻译:实时多试剂碰撞避免算法是实际使用无人机自己组织成群的无人机的关键赋能技术。 本文建议采用分散式的相互碰撞避免算法, 其依据是悬浮和可伸缩。 该算法计算成本低, 依据是当地测量的动态动态累积信号强度的梯度, 由群温发出的信号产生。 信号强度对每架无人机起反作用作用, 该无人机往往从最敏感区域( 杂乱的环境) 出发, 从而避免碰撞。 这些反作用力的规模可以调整, 以控制为避免碰撞而赋予的相对重要性, 避免与影响该物剂动态的其他现象发生碰撞。 我们对自发打击野火的无人机群进行了数字实验。 正如所预期的那样, 已经发现, 降低碰撞率可以通过降低该物剂的巡航速度和/ 或提高全球信号强度场的取样频率来降低。 拟议的碰撞避免碰撞演算法的一个方便的副产品是, 有助于保持多样性。