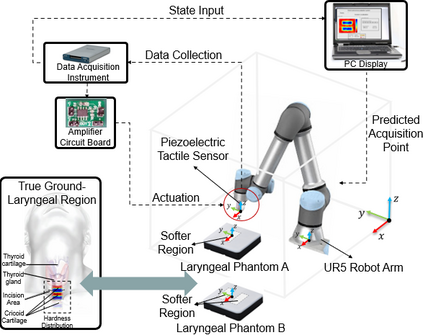
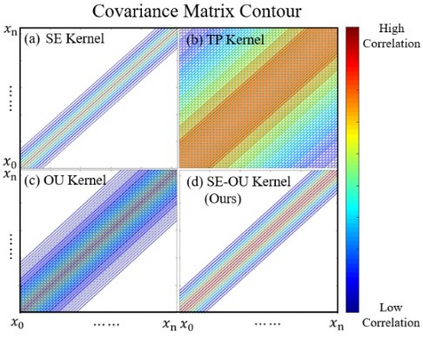
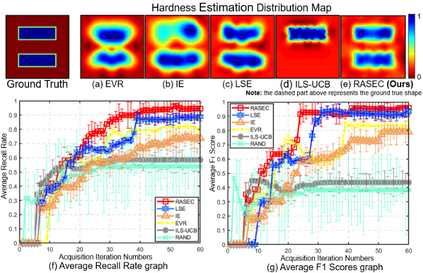
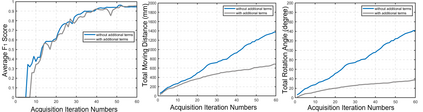
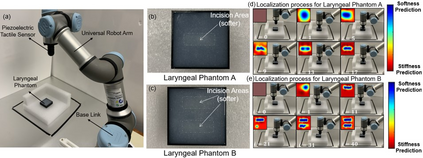
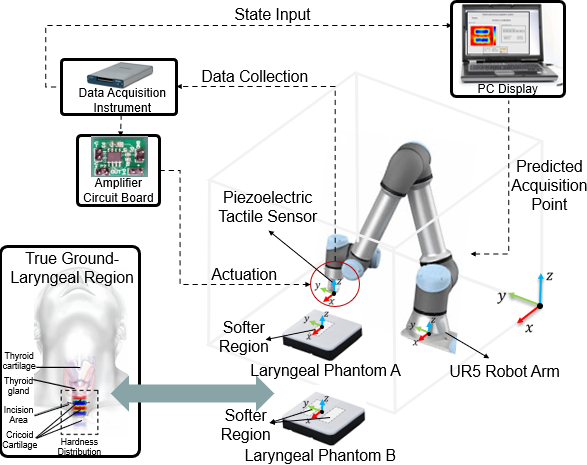
A novel palpation-based incision detection strategy in the laryngeal region, potentially for robotic tracheotomy, is proposed in this letter. A tactile sensor is introduced to measure tissue hardness in the specific laryngeal region by gentle contact. The kernel fusion method is proposed to combine the Squared Exponential (SE) kernel with Ornstein-Uhlenbeck (OU) kernel to figure out the drawbacks that the existing kernel functions are not sufficiently optimal in this scenario. Moreover, we further regularize exploration factor and greed factor, and the tactile sensor's moving distance and the robotic base link's rotation angle during the incision localization process are considered as new factors in the acquisition strategy. We conducted simulation and physical experiments to compare the newly proposed algorithm - Rescaling Acquisition Strategy with Energy Constraints (RASEC) in trachea detection with current palpation-based acquisition strategies. The result indicates that the proposed acquisition strategy with fusion kernel can successfully localize the incision with the highest algorithm performance (Average Precision 0.932, Average Recall 0.973, Average F1 score 0.952). During the robotic palpation process, the cumulative moving distance is reduced by 50%, and the cumulative rotation angle is reduced by 71.4% with no sacrifice in the comprehensive performance capabilities. Therefore, it proves that RASEC can efficiently suggest the incision zone in the laryngeal region and greatly reduced the energy loss.
翻译:在本信中,提议在喉咙区域采用一种新的以触摸为基础的切片检测战略,有可能用于机器人气管切开术。引入了触动感应器,以通过温和的接触测量特定喉咙区域的组织硬度。内核聚变法建议将正方脑(SE)内核与Ornstein-Uhlenbeck(OU)内核结合,以发现目前内核功能在这种情景中不够最佳的缺点。此外,我们进一步规范勘探系数和贪婪系数,以及触动感应器区域移动距离和机器人基链接在切开地定位过程中的旋转角度被认为是获取战略中的新因素。我们进行了模拟和物理实验,以便将新提议的算法-调整采购战略与目前内核获取战略的调和节能限制(RASEC)结合起来,结果显示,与凝固功能功能功能的获取战略可以成功地将感应力定位与最高值的感应变距离和机械基连接点的旋转角度定位角度进行移动。 平均汇率递减的递减的递后,平均递后递减的递后递减的递后算过程是0.932。