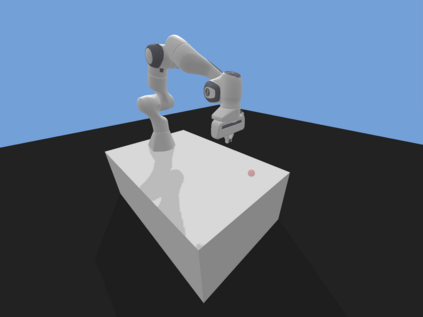
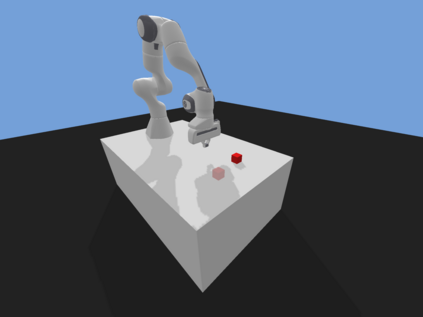
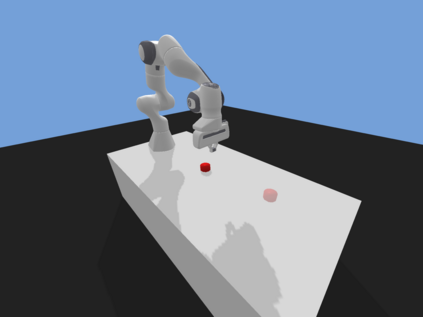
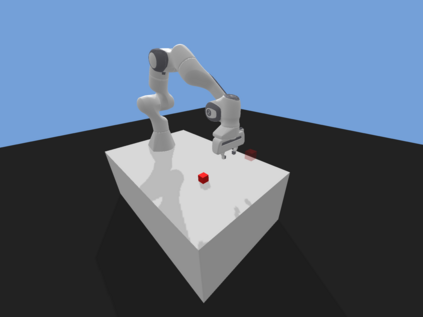
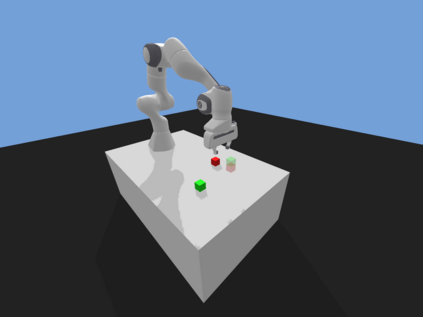
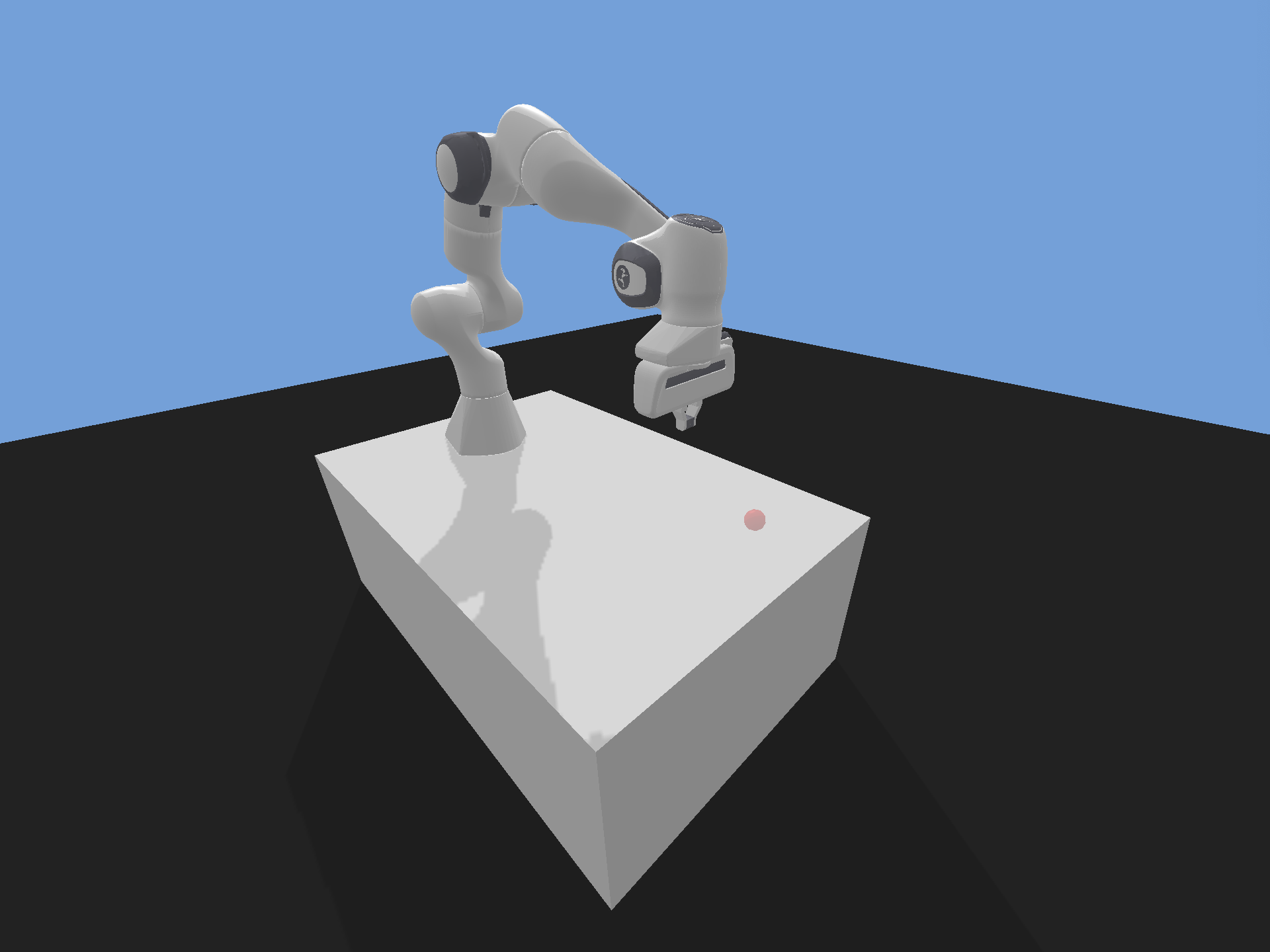
This technical report presents panda-gym, a set Reinforcement Learning (RL) environments for the Franka Emika Panda robot integrated with OpenAI Gym. Five tasks are included: reach, push, slide, pick & place and stack. They all follow a Multi-Goal RL framework, allowing to use goal-oriented RL algorithms. To foster open-research, we chose to use the open-source physics engine PyBullet. The implementation chosen for this package allows to define very easily new tasks or new robots. This report also presents a baseline of results obtained with state-of-the-art model-free off-policy algorithms. panda-gym is open-source at https://github.com/qgallouedec/panda-gym.
翻译:这份技术报告介绍了与OpenAI Gym结合的Franka Emika Panda机器人(Franka Emika Panda)的一套强化学习环境panda-gym。 包括五项任务: 达到、 推进、 幻灯片、 选择和位置以及堆叠。 它们都遵循一个多目标RL框架, 允许使用面向目标的RL算法。 为了促进开放研究, 我们选择使用开放源物理引擎 PyBullet。 为这个软件包所选择的实施可以很容易地定义新任务或新机器人。 本报告还介绍了与最先进的无型号非政策算法取得的结果的基准。 Panda- gym 在 https://github.com/qgalluedec/panda-gym 上是开源的。