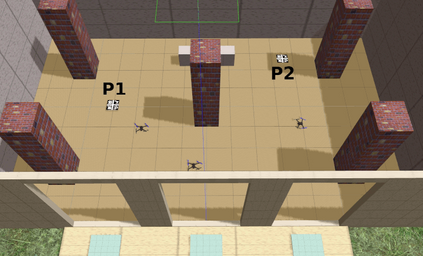
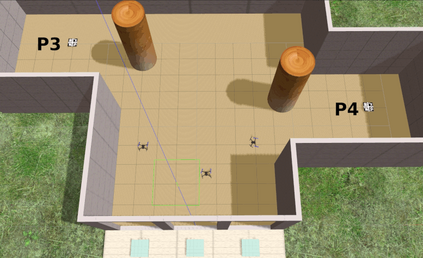
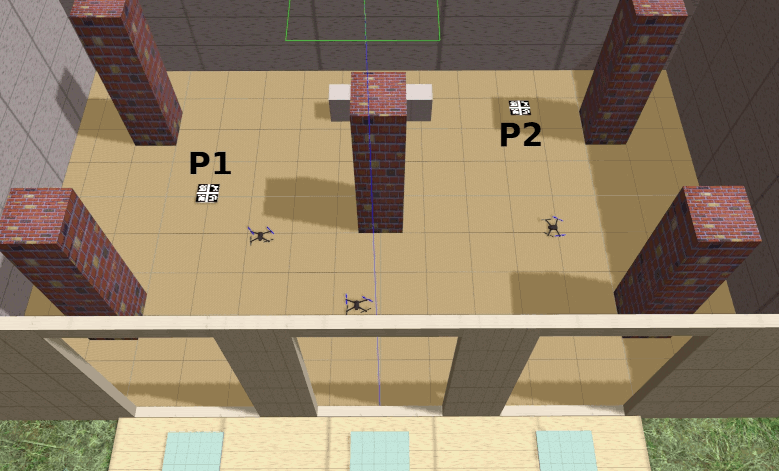
The use of multi-rotor Unmanned Aerial Vehicles (UAVs) for search and rescue as well as remote sensing is rapidly increasing. Multi-rotor UAVs, however, have limited endurance. The range of UAV applications can be widened if teams of multiple UAVs are used. We propose a framework for a team of UAVs to cooperatively explore and find a target in complex GPS-denied environments with obstacles. The team of UAVs autonomously navigates, explores, detects, and finds the target in a cluttered environment with a known map. Examples of such environments include indoor scenarios, urban or natural canyons, caves, and tunnels, where the GPS signal is limited or blocked. The framework is based on a probabilistic decentralised Partially Observable Markov Decision Process which accounts for the uncertainties in sensing and the environment. The team can cooperate efficiently, with each UAV sharing only limited processed observations and their locations during the mission. The system is simulated using the Robotic Operating System and Gazebo. Performance of the system with an increasing number of UAVs in several indoor scenarios with obstacles is tested. Results indicate that the proposed multi-UAV system has improvements in terms of time-cost, the proportion of search area surveyed, as well as successful rates for search and rescue missions.
翻译:多机器人无人驾驶飞行器(无人驾驶飞行器)用于搜索和救援以及遥感的使用正在迅速增加,但多机器人无人驾驶飞行器(无人驾驶飞行器)的耐受力有限。如果使用多个无人驾驶飞行器的小组,无人驾驶飞行器应用的范围可以扩大。我们提议一个框架,供无人驾驶飞行器小组合作探索和寻找在有障碍的复杂GPS封闭环境中的目标。无人驾驶飞行器小组自主导航、探索、探测和在有已知地图的封闭环境中找到目标。这种环境的例子包括室内情景、城市或自然峡谷、洞穴和隧道,全球定位系统信号有限或被屏蔽。这个框架以概率性分散部分可观测的Markov决定程序为基础,其中考虑到遥感和环境的不确定性。小组可以高效合作,每个无人驾驶飞行器只分享有限的经处理的观测结果及其在任务期间的位置。该系统使用机器人操作系统和Gazebo模拟,系统在多个搜索区中采用越来越多的搜索率,在多个搜索区中显示搜索率,在多个搜索区中,在多个搜索区中,系统在多个搜索区中的拟议搜索率比例是空投的。