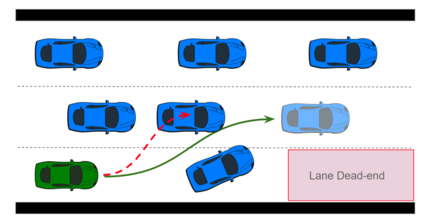
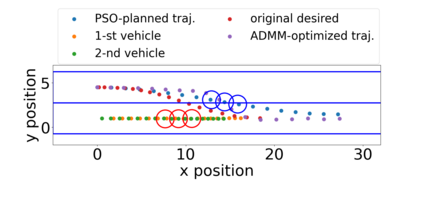
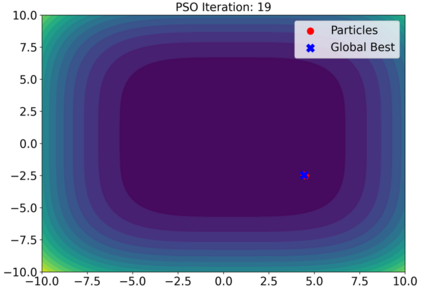
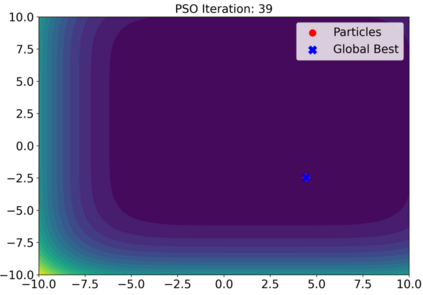
This paper introduces a novel numerical approach to achieving smooth lane-change trajectories in autonomous driving scenarios. Our trajectory generation approach leverages particle swarm optimization (PSO) techniques, incorporating Neural Network (NN) predictions for trajectory refinement. The generation of smooth and dynamically feasible trajectories for the lane change maneuver is facilitated by combining polynomial curve fitting with particle propagation, which can account for vehicle dynamics. The proposed planning algorithm is capable of determining feasible trajectories with real-time computation capability. We conduct comparative analyses with two baseline methods for lane changing, involving analytic solutions and heuristic techniques in numerical simulations. The simulation results validate the efficacy and effectiveness of our proposed approach.
翻译:暂无翻译