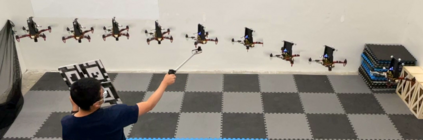
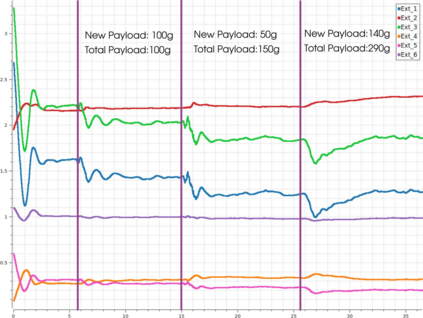
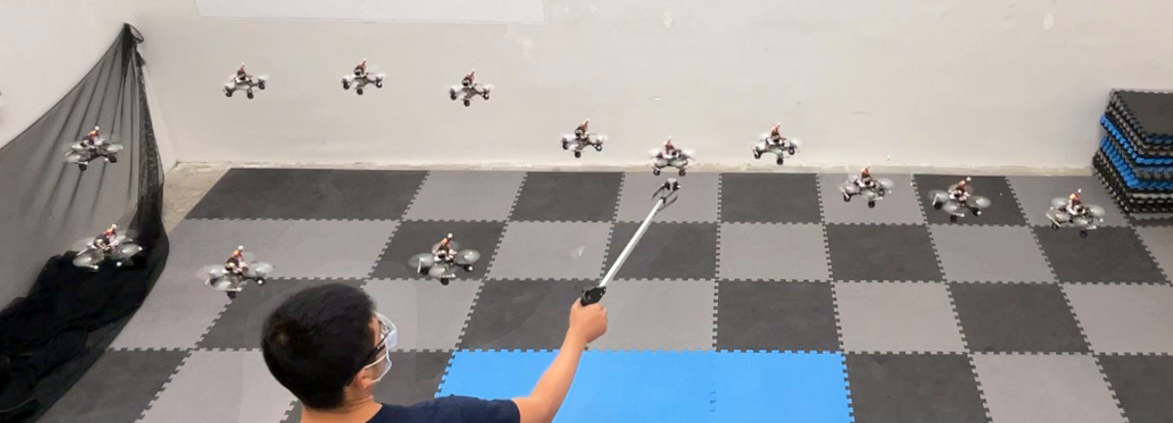
This paper proposes a universal adaptive controller for quadcopters, which can be deployed zero-shot to quadcopters of very different mass, arm lengths and motor constants, and also shows rapid adaptation to unknown disturbances during runtime. The core algorithmic idea is to learn a single policy that can adapt online at test time not only to the disturbances applied to the drone, but also to the robot dynamics and hardware in the same framework. We achieve this by training a neural network to estimate a latent representation of the robot and environment parameters, which is used to condition the behaviour of the controller, also represented as a neural network. We train both networks exclusively in simulation with the goal of flying the quadcopters to goal positions and avoiding crashes to the ground. We directly deploy the same controller trained in the simulation without any modifications on two quadcopters with differences in mass, inertia, and maximum motor speed of up to 4 times. In addition, we show rapid adaptation to sudden and large disturbances (up to 35.7%) in the mass and inertia of the quadcopters. We perform an extensive evaluation in both simulation and the physical world, where we outperform a state-of-the-art learning-based adaptive controller and a traditional PID controller specifically tuned to each platform individually. Video results can be found at https://dz298.github.io/universal-drone-controller/.
翻译:本文建议对四肢机械师实行通用适应控制器,该控制器可以对不同质量、正常长度和运动常数的四肢机械师进行零射,并显示在运行期间迅速适应未知的扰动。核心算法理念是学习一项单一的政策,不仅在测试时可以对适用于无人机的扰动进行在线调整,而且可以对同一框架内的机器人动力和硬件进行在线调整。我们为此培训神经网络,以估计机器人和环境参数的潜在代表(用于调节控制器的行为),同时也作为神经网络。我们专门在模拟中培训两个网络,目标是将四肢机械师飞到目标位置,避免坠落到地面。我们直接部署同一在模拟中受过训练的控制器,而不对两个在质量、惯性以及最大运动速度方面差异高达4倍的四肢机械师进行任何修改。此外,我们展示了对四肢机械师质量和惯性中突发和大规模扰动(高达35.7%)的动态和环境参数的快速适应。我们在模拟和物理世界中进行广泛的评估,目的是将四肢机械师飞向目标位置和避免碰撞碰撞碰撞。 我们可具体地在每一个的中央控制平台上学习。