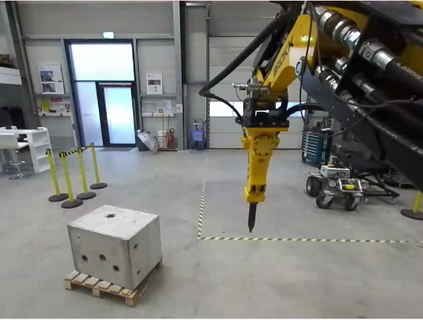
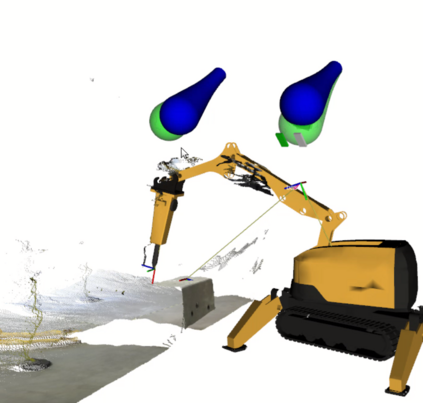
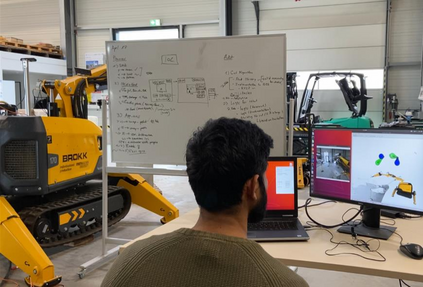
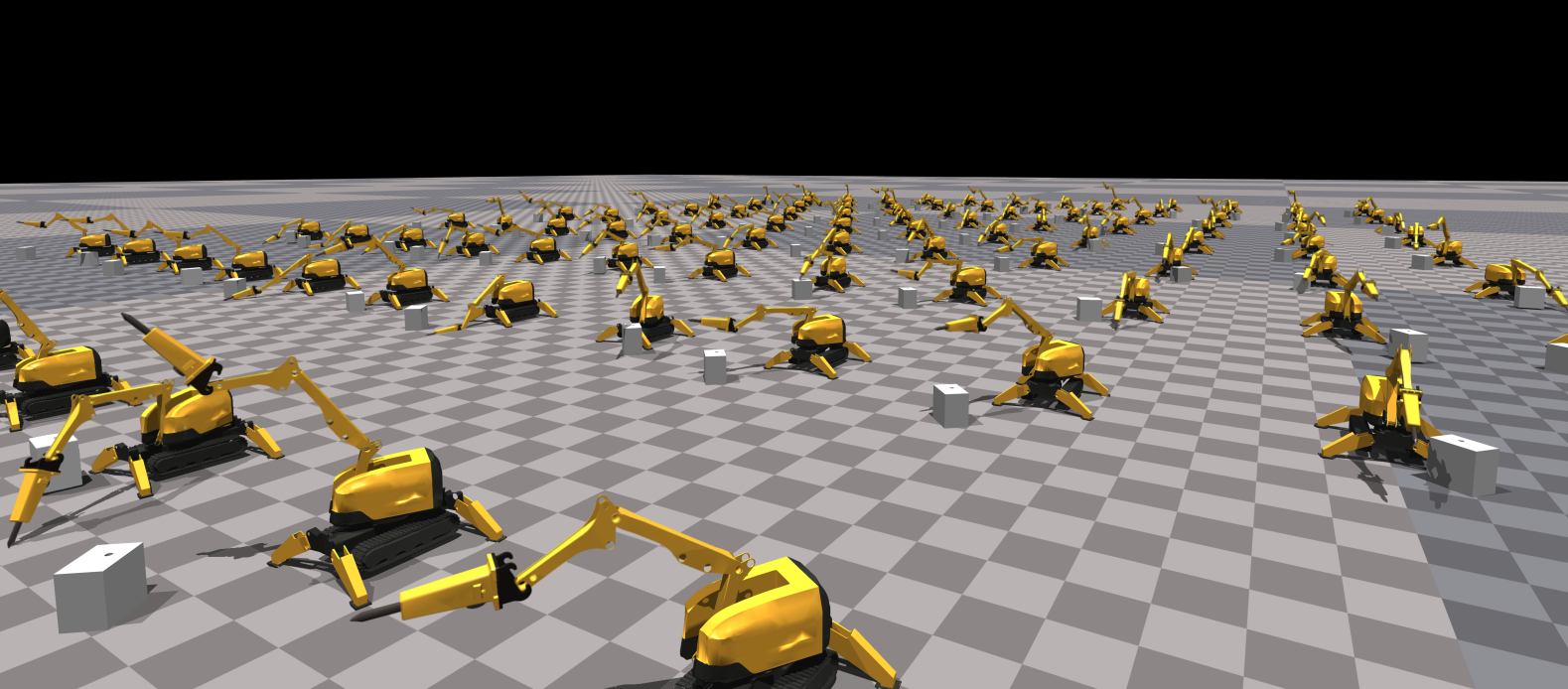
The utilization of teleoperation is a crucial aspect of the construction industry, as it enables operators to control machines safely from a distance. However, remote operation of these machines at a joint level using individual joysticks necessitates extensive training for operators to achieve proficiency due to their multiple degrees of freedom. Additionally, verifying the machine resulting motion is only possible after execution, making optimal control challenging. In addressing this issue, this study proposes a reinforcement learning-based approach to optimize task performance. The control policy acquired through learning is used to provide instructions on efficiently controlling and coordinating multiple joints. To evaluate the effectiveness of the proposed framework, a user study is conducted with a Brokk 170 construction machine by assessing its performance in a typical construction task involving inserting a chisel into a borehole. The effectiveness of the proposed framework is evaluated by comparing the performance of participants in the presence and absence of virtual fixtures. This study results demonstrate the proposed framework potential in enhancing the teleoperation process in the construction industry.
翻译:暂无翻译