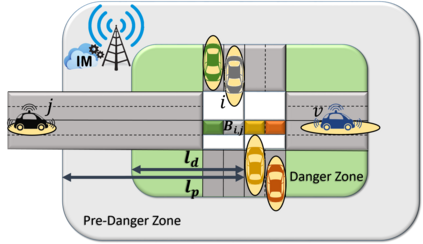
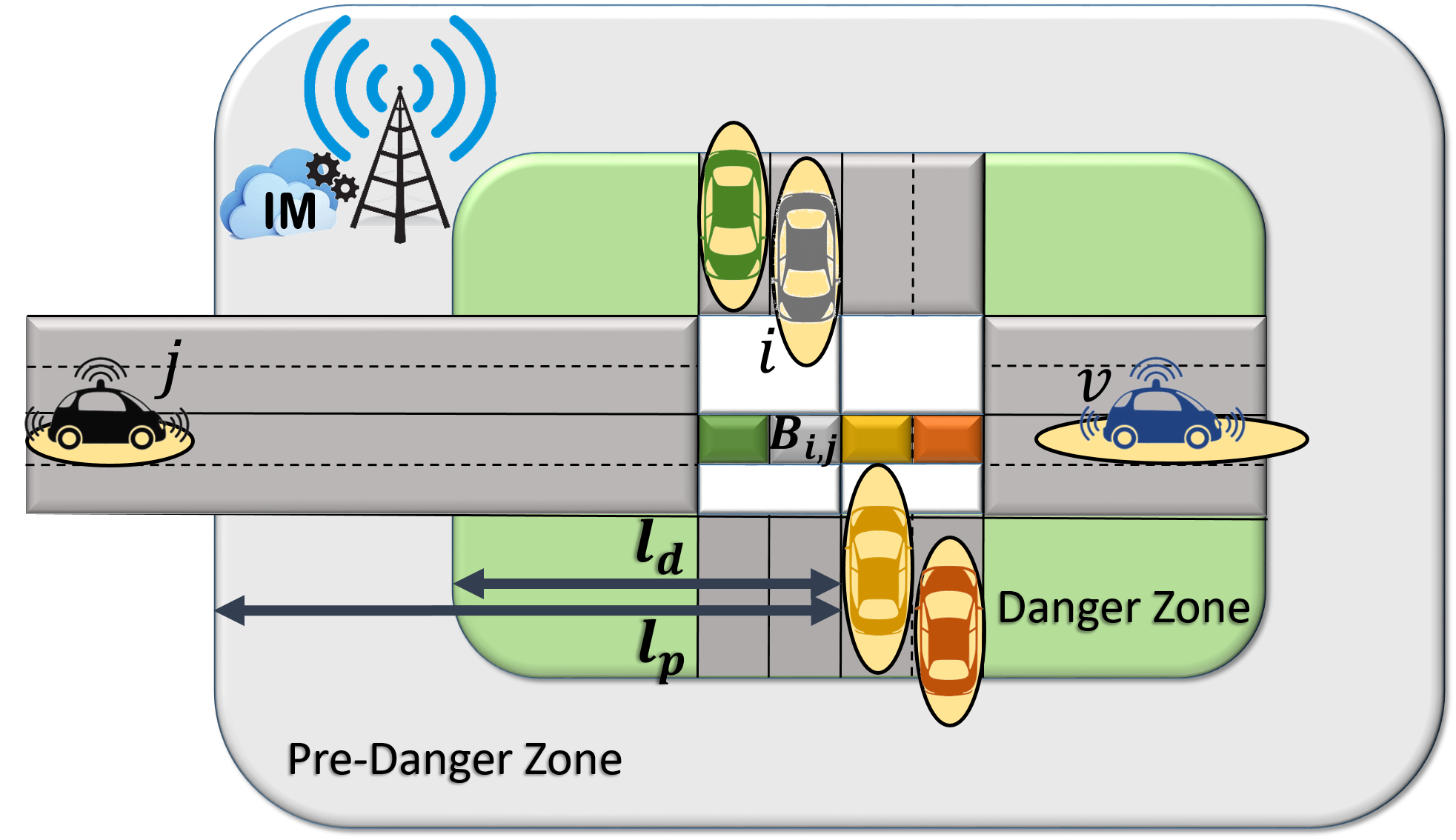
Intersection crossing represents a bottleneck for transportation systems and Connected Autonomous Vehicles (CAVs) may be the groundbreaking solution to the problem. This work proposes a novel framework, i.e, AVOID-PERIOD, where an Intersection Manager (IM) controls CAVs approaching an intersection in order to maximize intersection capacity while minimizing the CAVs' gas consumption. Contrary to most of the works in the literature, the CAVs' location uncertainty is accounted for and periodic communication and re-optimization allows for the creation of safe trajectories for the CAVs. To improve scalability for high-traffic intersections, an event-triggering approach is also developed (AVOID-EVENT) that minimizes computational and communication complexity. AVOID-EVENT reduces the number of re-optimizations required by 92.2%, while retaining most of the benefits introduced by AVOID-PERIOD.
翻译:这项工作提出了一个新的框架,即AVOID-PERIOD, 由一位跨部门管理人控制接近交叉点的CAV, 以便最大限度地增加交叉能力,同时尽量减少CAV的气体消耗量。与文献中的大部分作品相反,CAV的定位不确定性得到了考虑,定期通信和再优化允许为CAV创造安全轨道。为了提高高贸易交叉点的可扩展性,还制定了事件触发方法,最大限度地减少计算和通信的复杂性。VOID防止减少92.2%要求的再优化数量,同时保留AVOID-PERIOD提供的大部分好处。