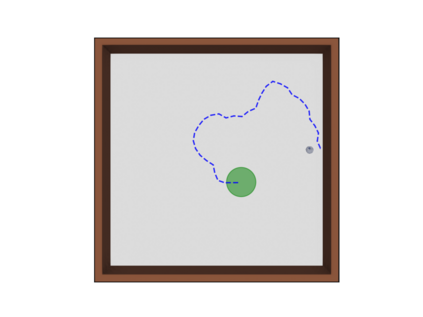
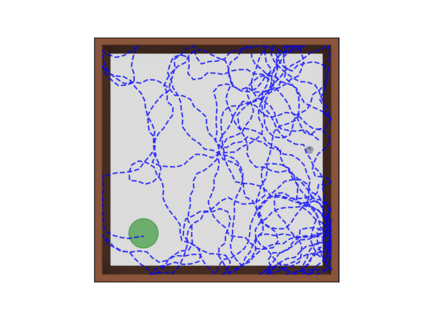
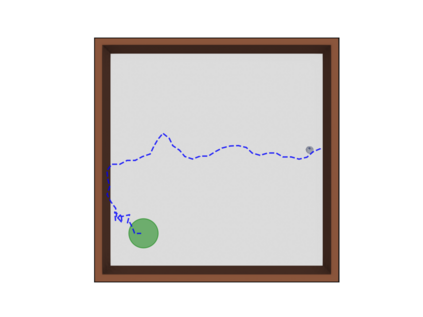
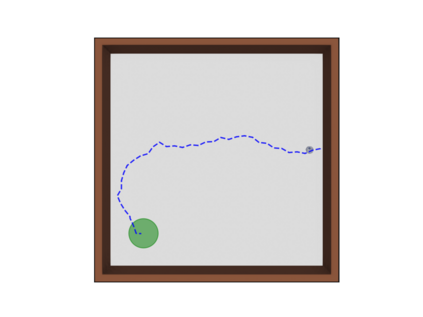
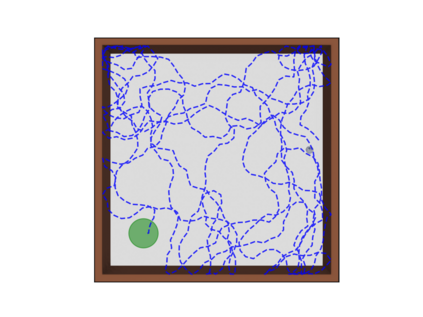
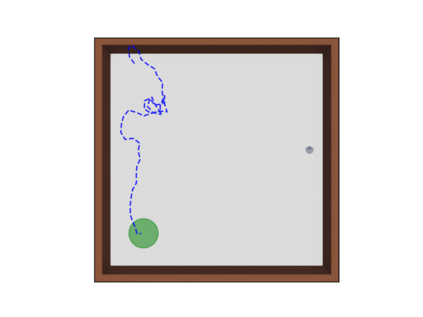
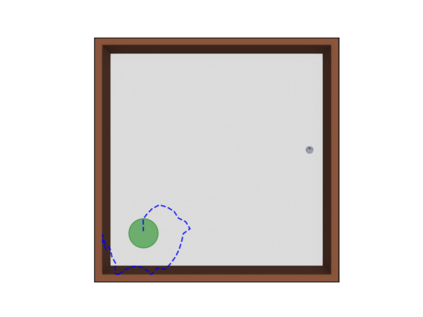
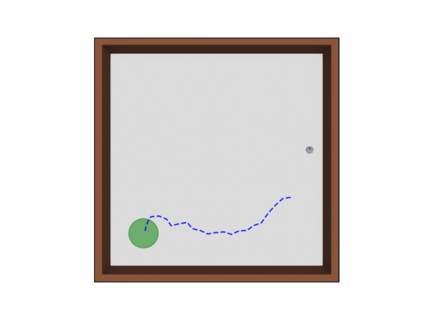
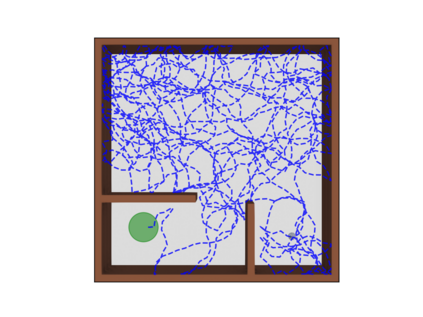
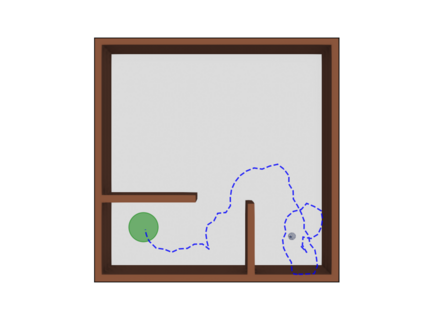
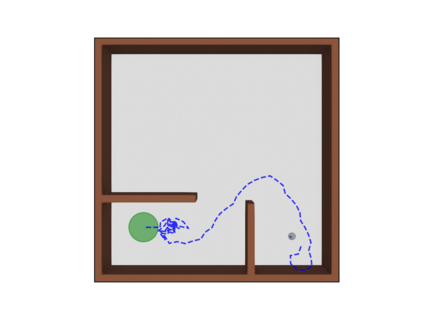
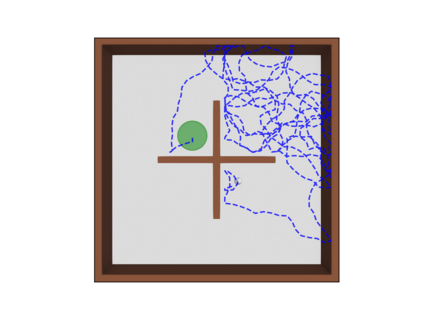
The discovery of place cells and other spatially modulated neurons in the hippocampal complex of rodents has been crucial to elucidating the neural basis of spatial cognition. More recently, the replay of neural sequences encoding previously experienced trajectories has been observed during consummatory behavior potentially with implications for quick memory consolidation and behavioral planning. Several promising models for robotic navigation and reinforcement learning have been proposed based on these and previous findings. Most of these models, however, use carefully engineered neural networks and are tested in simple environments. In this paper, we develop a self-organized model incorporating place cells and replay, and demonstrate its utility for rapid one-shot learning in non-trivial environments with obstacles.
翻译:在栖息地鼠群中发现地细胞和其他空间调控神经元对于阐明空间认知的神经基础至关重要,最近,在总结行为期间观察到神经序列重现编码了过去经历过的轨迹,这可能对快速记忆整合和行为规划产生影响。根据这些和以前的调查结果,提出了几套有希望的机器人导航和强化学习模型。但是,这些模型大多使用精心设计的神经网络,并在简单的环境中进行测试。在本文中,我们开发了一种自我组织的模型,其中含有位置细胞和重弹,并展示了该模型对于在有障碍的非三角环境中快速一次性学习的实用性。