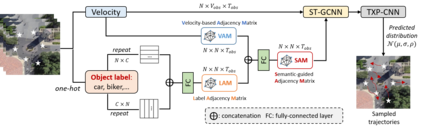
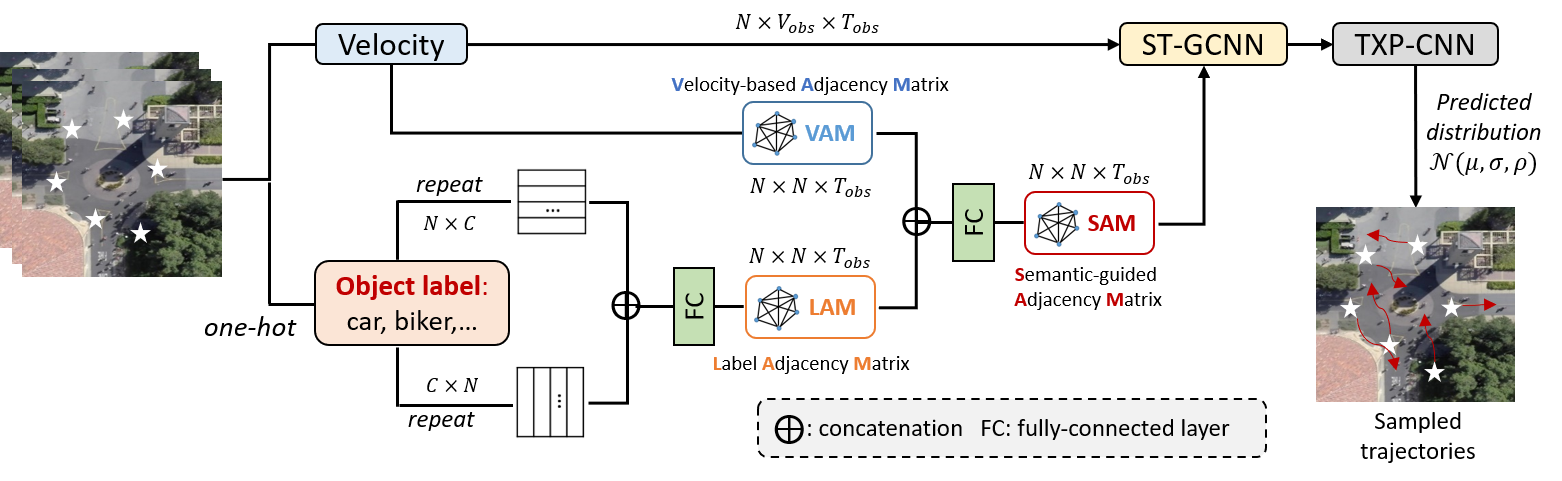
Predicting the movement trajectories of multiple classes of road users in real-world scenarios is a challenging task due to the diverse trajectory patterns. While recent works of pedestrian trajectory prediction successfully modelled the influence of surrounding neighbours based on the relative distances, they are ineffective on multi-class trajectory prediction. This is because they ignore the impact of the implicit correlations between different types of road users on the trajectory to be predicted - for example, a nearby pedestrian has a different level of influence from a nearby car. In this paper, we propose to introduce class information into a graph convolutional neural network to better predict the trajectory of an individual. We embed the class labels of the surrounding objects into the label adjacency matrix (LAM), which is combined with the velocity-based adjacency matrix (VAM) comprised of the objects' velocity, thereby generating a semantics-guided graph adjacency (SAM). SAM effectively models semantic information with trainable parameters to automatically learn the embedded label features that will contribute to the fixed velocity-based trajectory. Such information of spatial and temporal dependencies is passed to a graph convolutional and temporal convolutional network to estimate the predicted trajectory distributions. We further propose new metrics, known as Average2 Displacement Error (aADE) and Average Final Displacement Error (aFDE), that assess network accuracy more accurately. We call our framework Semantics-STGCNN. It consistently shows superior performance to the state-of-the-arts in existing and the newly proposed metrics.
翻译:预测现实世界情景中不同类别的道路使用者的流动轨迹是一项艰巨的任务,因为轨迹模式各不相同。虽然最近行人轨迹预测工程成功地模拟了周边邻居根据相对距离产生的影响,但在多级轨迹预测中却没有效果。这是因为这些工程忽视了不同类型道路使用者之间在预测轨迹上的隐含关联的影响 — — 例如,附近行人与附近一辆汽车有着不同程度的影响。在本文中,我们提议将类信息引入一个图形共振神经网络,以便更好地预测一个人的轨迹。我们将周围物体的类标签成功地嵌入了标签相邻矩阵(LAM),该矩阵与由物体速度构成的基于速度的相邻矩阵(VAM)相结合,从而产生了一个语义指导图相邻性的影响。SAM有效地模拟了具有可培训参数的语义信息,以自动学习有助于固定速度轨迹的内嵌标签特征。这种空间和时间依赖性对象的类标签标签标识信息被嵌入了标签标签标签标签标签标签的标签标签标签标签标签。这种空间和时间标签标签标签标签标签的标签标签标签的标签标签标签标签标签标签与相带矩阵(LAM(LAM)的标签与基于天际相近相邻邻居相联,该标签表的快速矩阵,该矩阵与由速度构成速度矩阵的高速矩阵组成,后者组成,后者与由速度矩阵构成的高速矩阵组成,后者组成,后者组成,后者与由速度表构成为速度表组成,后者构成为速度框架,后者,后者,后者,后者为速度轴系与天际关系,后者为速度轴系为速度轴算,后者为速度轴算,后者为速度轴算,后者为时间际关系,后者为速度直径直径直径直径直径比。