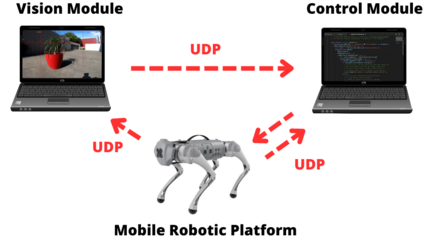
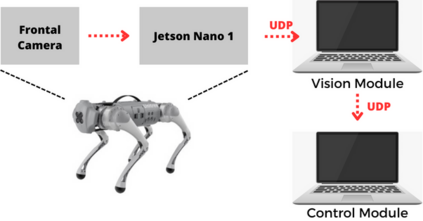
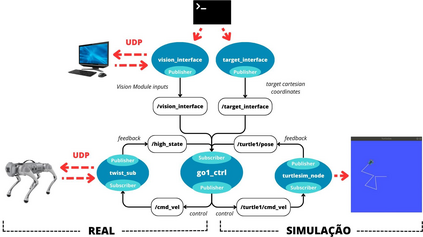
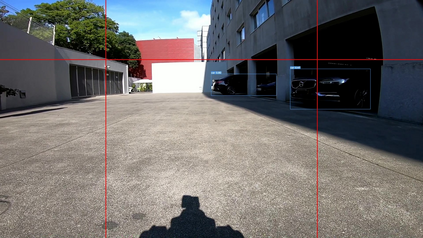
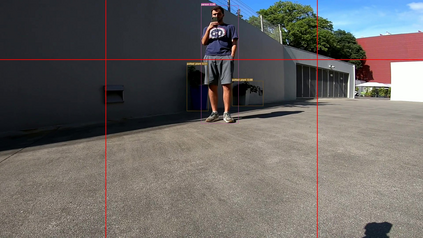
The 6G paradigm and the massive usage of interconnected wireless devices introduced the need for flexible wireless networks. A promising approach lies in employing Mobile Robotic Platforms (MRPs) to create communications cells on-demand. The challenge consists in positioning the MRPs to improve the wireless connectivity offered. This is exacerbated in millimeter wave (mmWave), Terahertz (THz), and visible light-based networks, which imply the establishment of short-range, Line of Sight (LoS) wireless links to take advantage of the ultra-high bandwidth channels available. This paper proposes a solution to enable the obstacle-aware, autonomous positioning of MRPs and provide LoS wireless connectivity to communications devices. It consists of 1) a Vision Module that uses video data gathered by the MRP to determine the location of obstacles, wireless devices and users, and 2) a Control Module, which autonomously positions the MRP based on the information provided by the Vision Module. The proposed solution was validated in simulation and through experimental testing, showing that it is able to position an MRP while ensuring LoS wireless links between a mobile communications cell and wireless devices or users.
翻译:暂无翻译