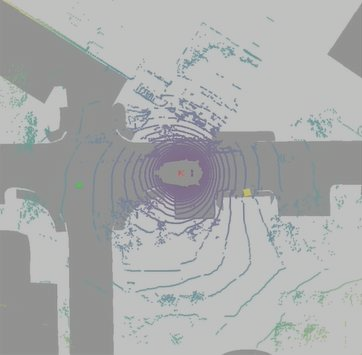
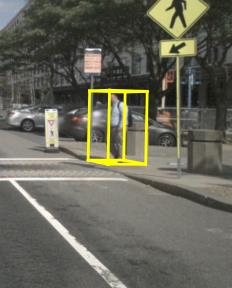
One of the most crucial yet challenging tasks for autonomous vehicles in urban environments is predicting the future behaviour of nearby pedestrians, especially at points of crossing. Predicting behaviour depends on many social and environmental factors, particularly interactions between road users. Capturing such interactions requires a global view of the scene and dynamics of the road users in three-dimensional space. This information, however, is missing from the current pedestrian behaviour benchmark datasets. Motivated by these challenges, we propose 1) a novel graph-based model for predicting pedestrian crossing action. Our method models pedestrians' interactions with nearby road users through clustering and relative importance weighting of interactions using features obtained from the bird's-eye-view. 2) We introduce a new dataset that provides 3D bounding box and pedestrian behavioural annotations for the existing nuScenes dataset. On the new data, our approach achieves state-of-the-art performance by improving on various metrics by more than 15% in comparison to existing methods. The dataset is available at https://github.com/huawei-noah/PePScenes.
翻译:对于城市环境中的自治车辆来说,最关键但最具有挑战性的任务之一是预测附近行人的未来行为,特别是在过境点。预测行为取决于许多社会和环境因素,特别是道路使用者之间的互动。掌握这种互动需要三维空间对道路使用者的场景和动态进行全球观察。然而,目前行人行为基准数据集中缺少这一信息。受这些挑战的驱动,我们提议(1)以图表为基础预测行人过境行动的新模式。我们的方法模型模拟行人与附近行人的互动,利用鸟眼观的特征进行集群和互动相对重要性加权。(2)我们引入了一套新的数据集,为现有的nuscenes数据集提供3D边框和行人行为说明。关于新数据,我们的方法通过改进各种计量,与现有方法相比提高15%以上,从而达到最新业绩。数据集见https://github.com/huawi-noah/Pepecenes。