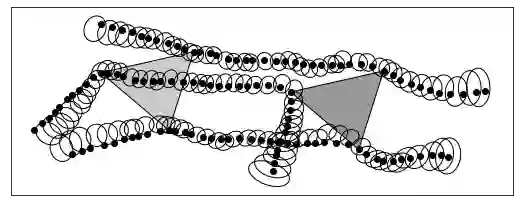
In this paper, we propose a parametrised factor that enables inference on Gaussian networks where linear dependencies exist among the random variables. Our factor representation is a generalisation of traditional Gaussian parametrisations where the positive-definite constraint (of covariance and precision matrices) has been relaxed. For this purpose, we derive various statistical operations and results (such as marginalisation, multiplication and affine transformations of random variables) which extend the capabilities of Gaussian factors to these degenerate settings. By using this principled factor definition, degeneracies can be accommodated accurately and automatically at little additional computational cost. As illustration, we apply our methodology to a representative example involving recursive state estimation of cooperative mobile robots.
翻译:在本文中,我们提出了一个可以推断高斯网络(在随机变量中存在着线性依赖性)的参数。我们的系数代表是传统的高斯偏差的概略,因为(常变和精确矩阵的)正定限制已经放松。为此,我们得出各种统计操作和结果(如随机变量的边缘化、倍增和近似变异),将高斯因素的能力扩大到这些堕落的环境。通过使用这一原则性要素定义,可以精确和自动地以少量的额外计算成本来适应退化。例如,我们用我们的方法对涉及合作型移动机器人的循环状态估计的典型采用。