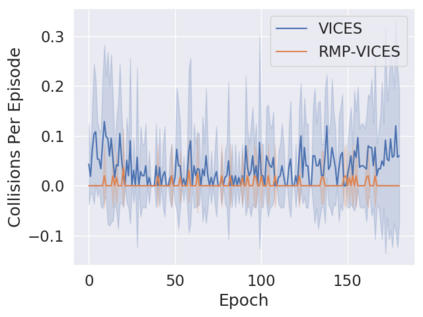
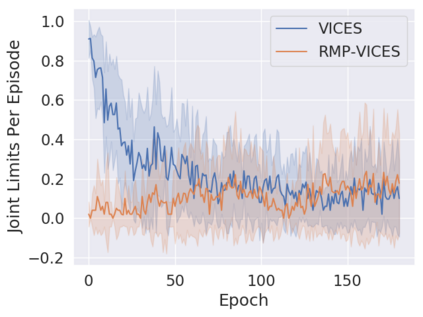
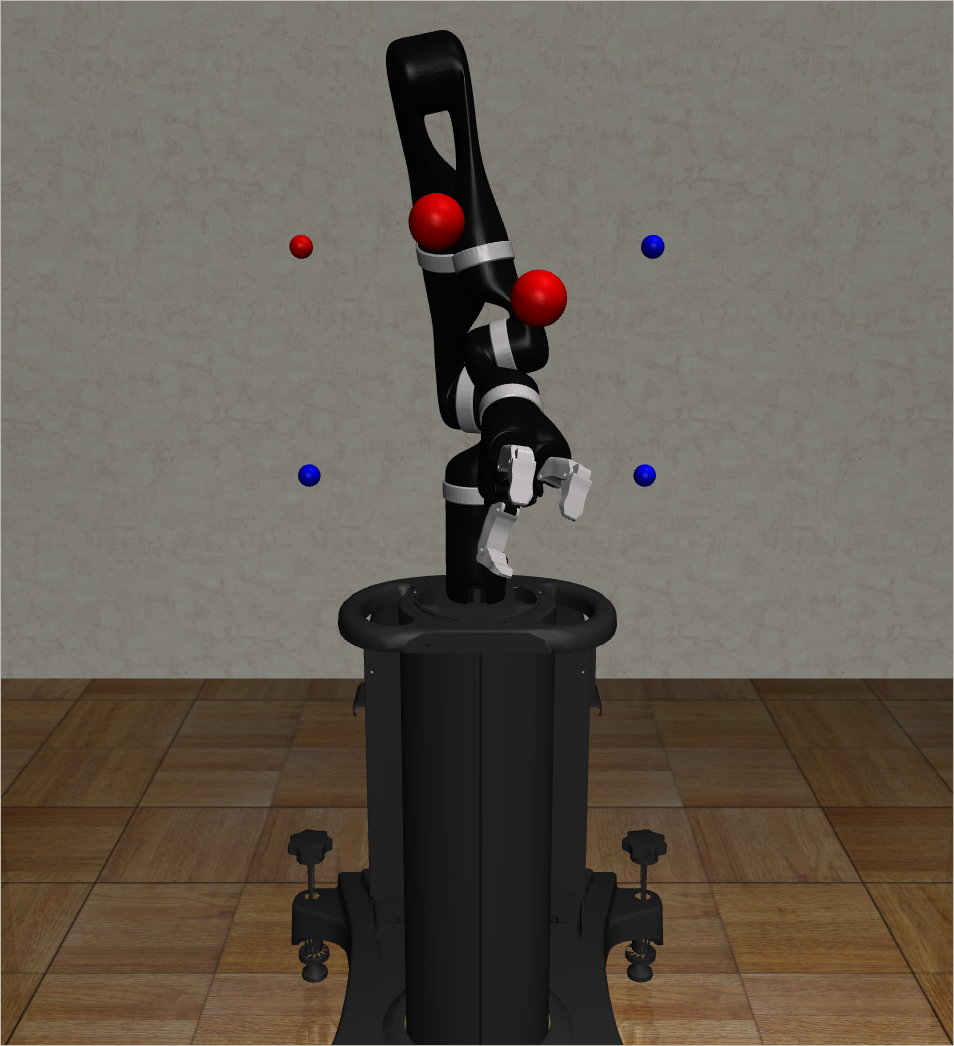
Variable impedance control in operation-space is a promising approach to learning contact-rich manipulation behaviors. One of the main challenges with this approach is producing a manipulation behavior that ensures the safety of the arm and the environment. Such behavior is typically implemented via a reward function that penalizes unsafe actions (e.g. obstacle collision, joint limit extension), but that approach is not always effective and does not result in behaviors that can be reused in slightly different environments. We show how to combine Riemannian Motion Policies, a class of policies that dynamically generate motion in the presence of safety and collision constraints, with variable impedance operation-space control to learn safer contact-rich manipulation behaviors.
翻译:操作空间中的可变障碍控制是一种很有希望的学习接触丰富的操纵行为的方法。 这种方法的主要挑战之一是产生一种能确保手臂和环境安全的操纵行为。 这种行为通常通过一种奖励功能来实施,该功能惩罚不安全的行为(例如障碍碰撞、联合限制延伸),但这种方法并不总是有效,不会导致在略微不同的环境中再利用的行为。 我们展示了如何将里曼尼主义运动政策(Riemannian Motion Policy)结合起来,这一政策在安全和碰撞制约下动态地产生动态,与可变的阻力操作-空间控制相结合,学习更安全的接触丰富的操纵行为。