
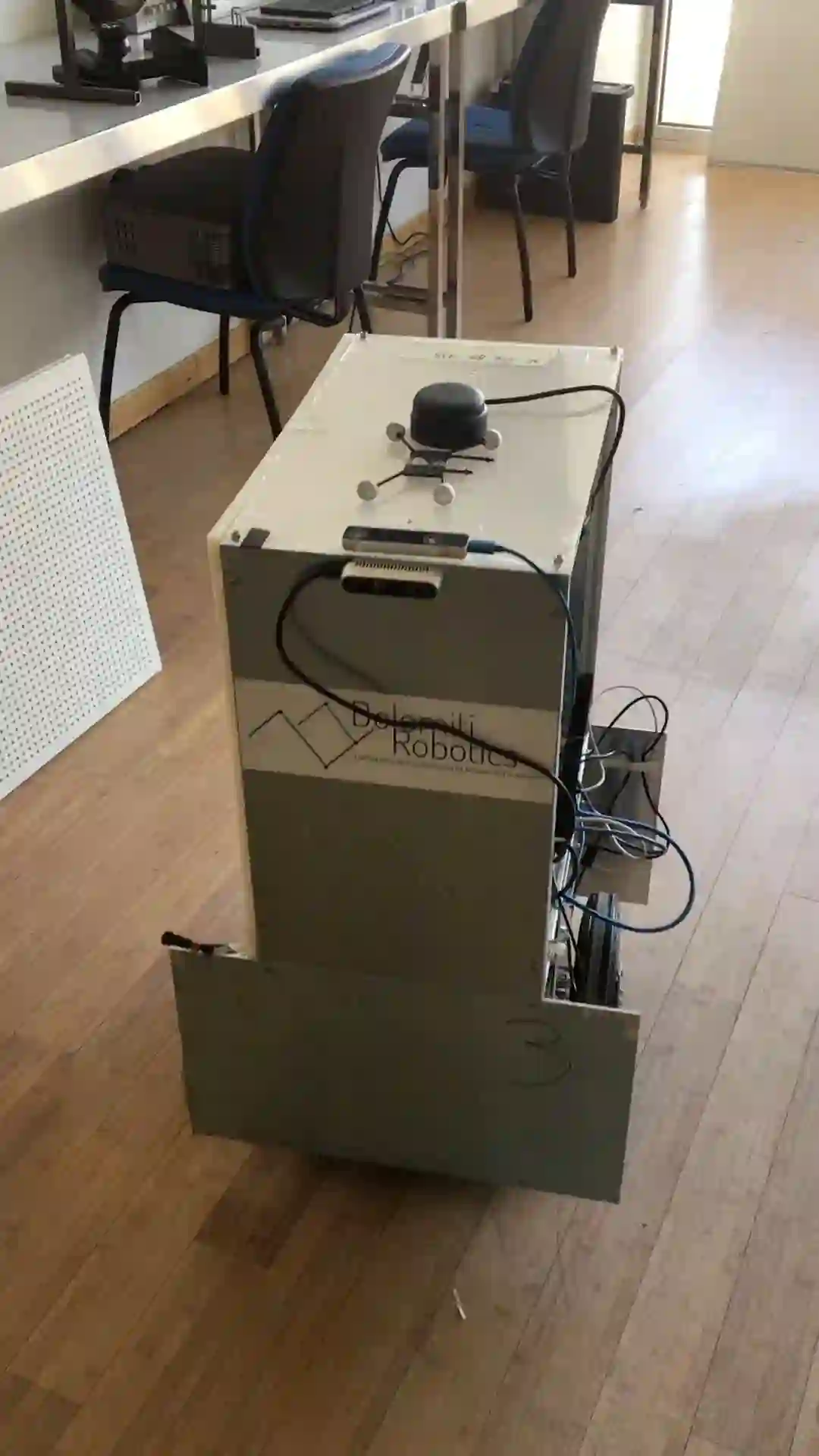
One of the most important barriers toward a widespread use of mobile robots in unstructured and human populated work environments is the ability to plan a safe path. In this paper, we propose to delegate this activity to a human operator that walks in front of the robot marking with her/his footsteps the path to be followed. The implementation of this approach requires a high degree of robustness in locating the specific person to be followed (the leader). We propose a three phase approach to fulfil this goal: 1. identification and tracking of the person in the image space, 2. sensor fusion between camera data and laser sensors, 3. point interpolation with continuous curvature curves. The approach is described in the paper and extensively validated with experimental results.
翻译:在无结构的和人口密集的工作环境中广泛使用移动机器人的最重要障碍之一,是规划安全道路的能力。在本文件中,我们提议将这项活动委托给在机器人标志前面行走的人操作者,由她/他的足迹决定所要遵循的道路。实施这一方法需要高度稳健地确定所要遵循的具体人员(领导人)的位置。我们建议了实现这一目标的三阶段方法:1. 识别和跟踪图像空间中的人,2. 相机数据与激光传感器之间的感应聚合,3. 点间插与连续的曲线。文件描述了这一方法,并用实验结果对其进行广泛验证。


相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


