
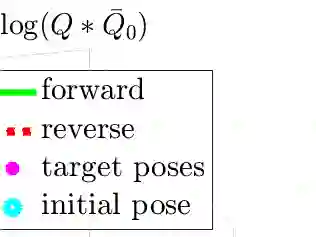
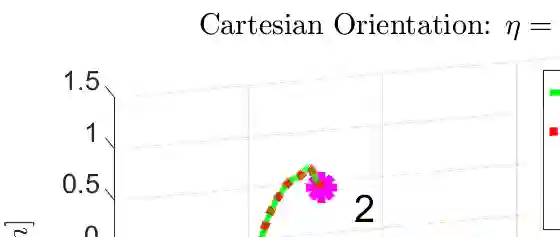
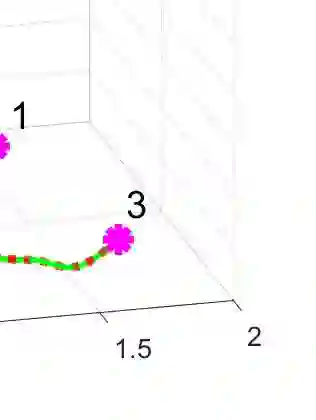
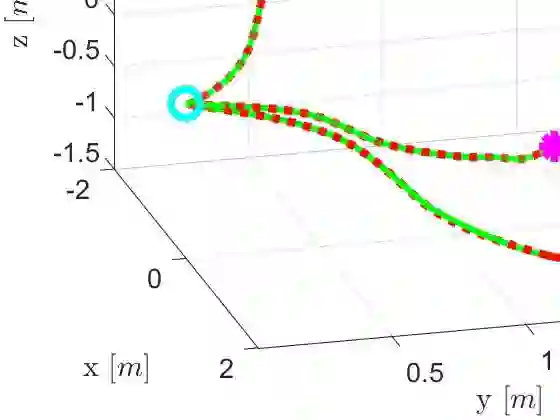
In this work, a novel Dynamic Movement Primitive (DMP) formulation is proposed which supports reversibility, i.e. backwards reproduction of a learned trajectory, while also sharing all favourable properties of classical DMP. Classical DMP have been extensively used for encoding and reproducing a desired motion pattern in several robotic applications. However, they lack reversibility, which is a useful and expedient property that can be leveraged in many scenarios. The proposed formulation is analyzed theoretically and is validated through simulations and experiments.
翻译:在这项工作中,提出了新的动态运动原始(DMP)配方,支持可逆性,即向后复制学到的轨迹,同时分享古典DMP的所有有利特性。古典DMP在数种机器人应用中被广泛用于编码和复制所需的运动模式,然而,它们缺乏可逆性,而这种可逆性在许多情况下是可以利用的有用和方便的属性。提议的配方在理论上进行了分析,并通过模拟和实验加以验证。
相关内容

iOS 8 提供的应用间和应用跟系统的功能交互特性。
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem
- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2020年12月2日
相关主题



相关VIP内容
专知会员服务
36+阅读 · 2019年10月17日
相关资讯
相关论文
Arxiv
0+阅读 · 2020年12月2日