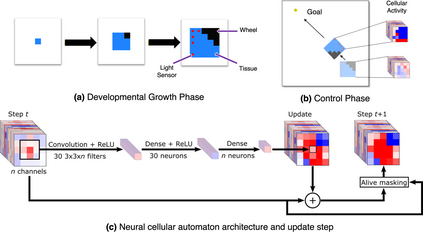
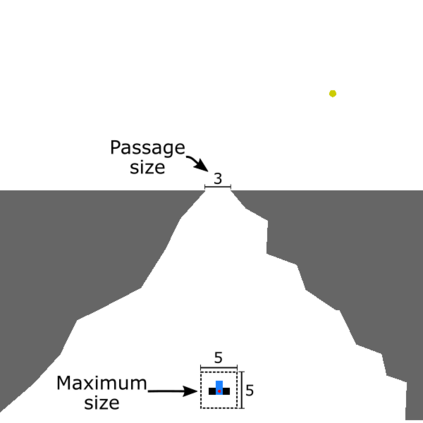
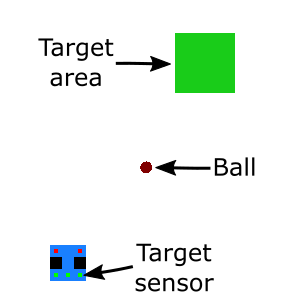
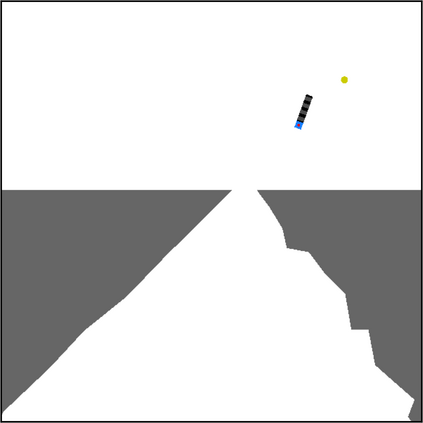
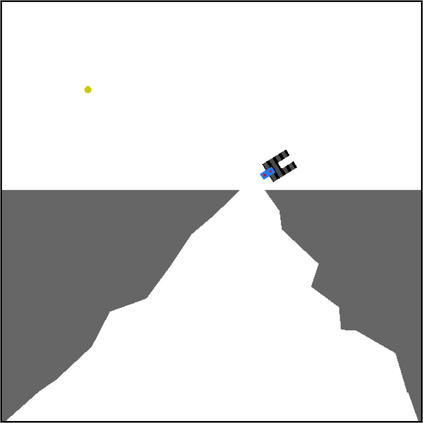
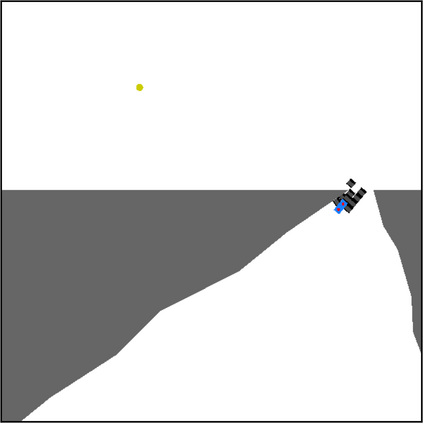
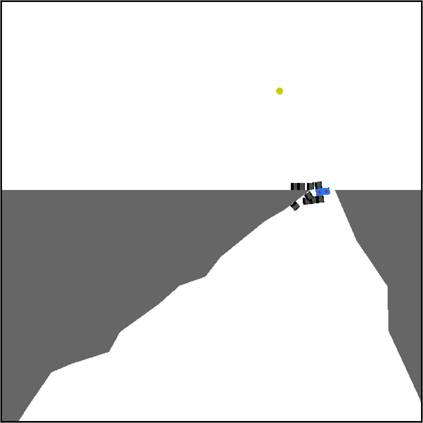
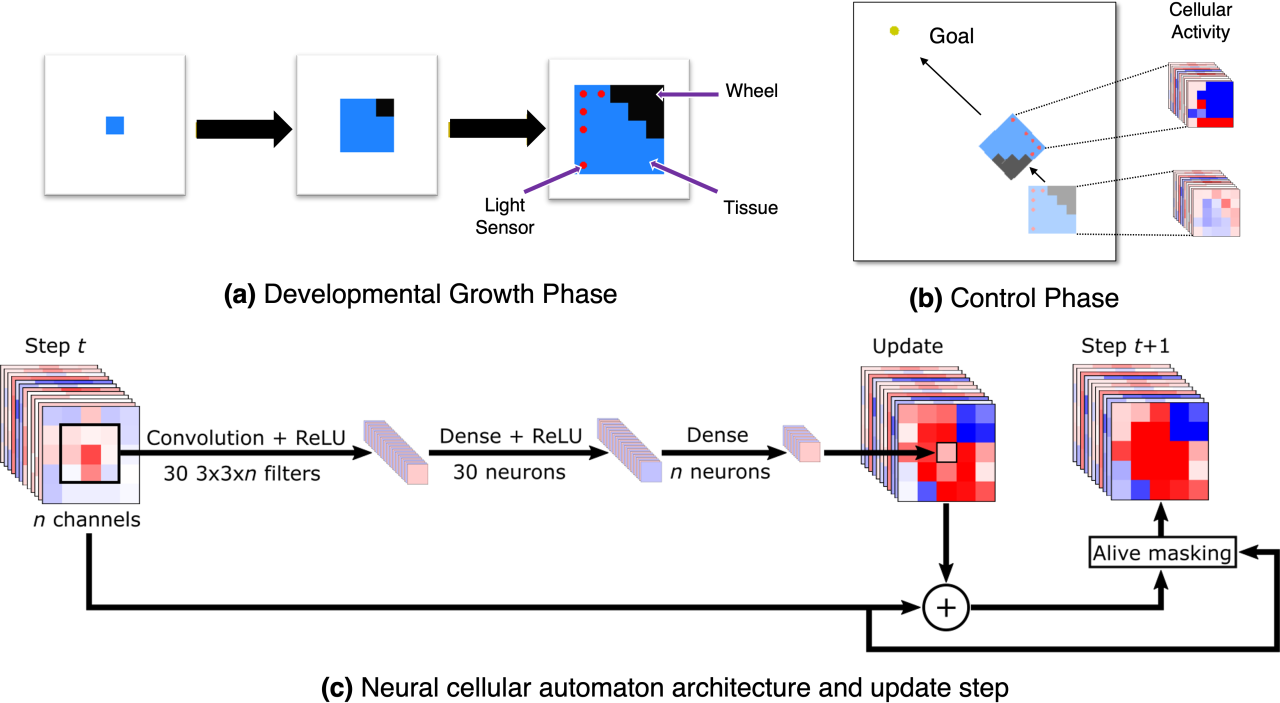
The discovery of complex multicellular organism development took millions of years of evolution. The genome of such a multicellular organism guides the development of its body from a single cell, including its control system. Our goal is to imitate this natural process using a single neural cellular automaton (NCA) as a genome for modular robotic agents. In the introduced approach, called Neural Cellular Robot Substrate (NCRS), a single NCA guides the growth of a robot and the cellular activity which controls the robot during deployment. We also introduce three benchmark environments, which test the ability of the approach to grow different robot morphologies. In this paper, NCRSs are trained with covariance matrix adaptation evolution strategy (CMA-ES), and covariance matrix adaptation MAP-Elites (CMA-ME) for quality diversity, which we show leads to more diverse robot morphologies with higher fitness scores. While the NCRS can solve the easier tasks from our benchmark environments, the success rate reduces when the difficulty of the task increases. We discuss directions for future work that may facilitate the use of the NCRS approach for more complex domains.
翻译:复杂的多细胞有机体的发现经过了数百万年的演进。这种多细胞有机体的基因组指导着其身体从一个单细胞细胞的发育,包括其控制系统。我们的目标是利用单一神经细胞自成体(NCA)来模拟这一自然过程,作为模块机器人剂的基因组。在采用的方法中,称为神经细胞自成体机器人子(NCRS),一个单一的NCAA来指导机器人的成长和在部署期间控制机器人的蜂窝活动。我们还引入了三个基准环境,测试了该方法培养不同机器人形态的能力。在本文件中,NCRSs接受了可变矩阵适应进化战略(CMA-ES)和可变式矩阵适应MAP-Elites(CMA-ME)的训练,以适应质量多样性,我们显示了这些变化矩阵导致更多样化的机器人形态,而健康得分更高。虽然NCRS可以解决我们基准环境中较容易的任务,但成功率在任务增加时会降低。我们讨论了未来工作的方向,这可能有助于将NCRS方法用于更复杂的领域。