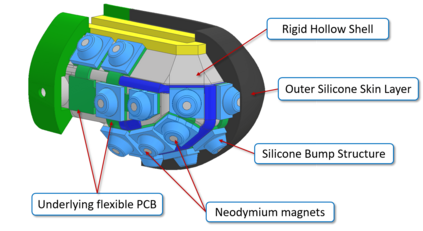
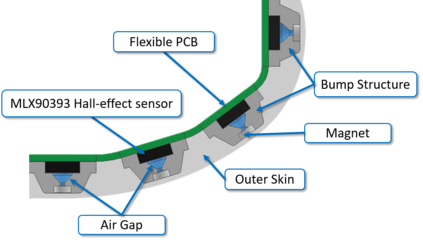
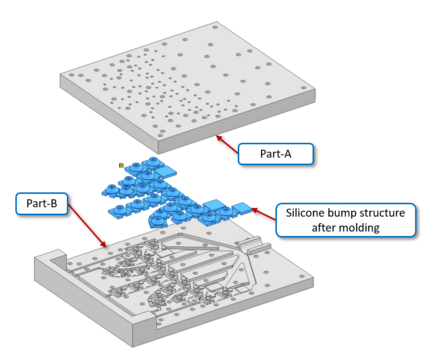
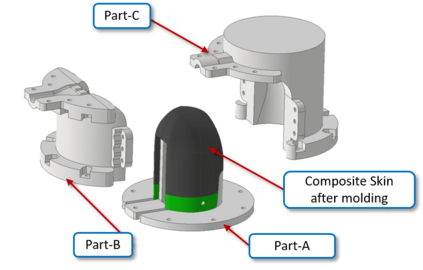
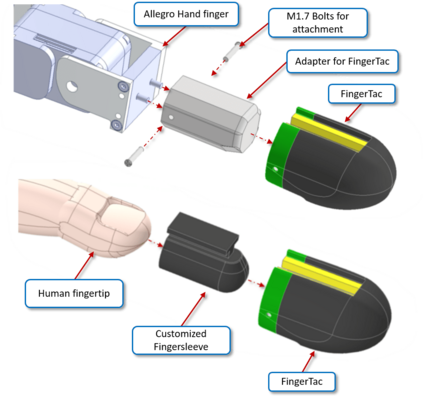
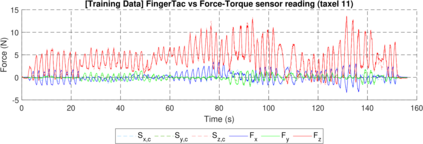
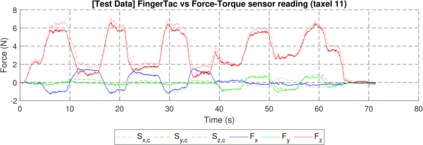
Skill transfer from humans to robots is challenging. Presently, many researchers focus on capturing only position or joint angle data from humans to teach the robots. Even though this approach has yielded impressive results for grasping applications, reconstructing motion for object handling or fine manipulation from a human hand to a robot hand has been sparsely explored. Humans use tactile feedback to adjust their motion to various objects, but capturing and reproducing the applied forces is an open research question. In this paper we introduce a wearable fingertip tactile sensor, which captures the distributed 3-axis force vectors on the fingertip. The fingertip tactile sensor is interchangeable between the human hand and the robot hand, meaning that it can also be assembled to fit on a robot hand such as the Allegro hand. This paper presents the structural aspects of the sensor as well as the methodology and approach used to design, manufacture, and calibrate the sensor. The sensor is able to measure forces accurately with a mean absolute error of 0.21, 0.16, and 0.44 Newtons in X, Y, and Z directions, respectively.
翻译:暂无翻译